Hello readers, I hope you are all doing great. Welcome to the 2nd lecture of Section 5(ESP32 Sensors) in the ESP32 Programming Series. In the previous tutorial, we discussed the built-in ESP32 Hall Effect Sensor. In this tutorial, we will discuss another inbuilt sensor of the ESP32 i.e. Capacitive Touch Sensor.
ESP32 Board has 10 built-in capacitive touch pins, which generate an electrical signal when someone touches these pins. These ESP32 touch pins are normally used to wake up the board from deep sleep mode. These touch pins are also used to replace the normal mechanical buttons with touch pads, improving the presentation of the IoT projects.
Here's the video demonstration of the ESP32 Capacitive Touch Sensor:
Before going forward, let's first understand how this touch sensor works:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Capacitance is determined by the geometry of the conductors and the dielectric materials used. Changing any of these factors will result in changing the capacitance.
C = Ad
As we know, the human body also carries a small electric charge. So, when a body approaches the metallic plates(of a capacitor), the mutual capacitance between the two metal plates decreases. This change in capacitance is used to detect the touch in these capacitive sensors.
So, if someone touches any of these pins, ESP32 can easily detect it. The pin mapping of touch-sensitive pins in DOIT ESP32 DevKit V1 with GPIO pins is shown below:
| ESP32 Capacitive Touch Pins | ||||
|---|---|---|---|---|
| No. | Parameter Name | Parameter Value | ||
| 1 |
Touch0 | GPIO4 | ||
| 2 |
Touch1 | GPIO0(not available in DOIT ESP32 Dev-kit V1 30-pin module but available in the 36-pin module) | ||
| 3 |
Touch2 | GPIO2 | ||
| 4 |
Touch3 | GPIO15 | ||
| 5 |
Touch4 | GPIO13 | ||
| 6 |
Touch5 | GPIO12 | ||
| 7 |
Touch6 | GPIO14 | ||
| 8 |
Touch7 | GPIO27 | ||
| 9 |
Touch8 | GPIO33 | ||
| 10 |
Touch9 | GPIO32 | ||
We are using the Arduino IDE development environment for programming ESP32. If you are new to Arduino IDE, read out How to Install ESP32 in Arduino IDE. Let's use the builtin Touch Sensor example in Arduino IDE:
In Arduino IDE there are two example codes available for the ESP32 touch sensor. We will discuss and implement both example codes in this tutorial. So, let's first open the TouchRead Code:
Here's the code for the TouchRead Example:
// ESP32 Touch Test
void setup()
{
Serial.begin(115200);
delay(1000); // give me time to bring up serial monitor
Serial.println("ESP32 Touch Test");
}
void loop()
{
Serial.println(touchRead(T0)); // get value using T0
delay(1000);
}Inside the setup() function, the serial monitor is initialized at a baud rate of 115200 to display the sensor readings. Finally, we printed the message(ESP32 Touch Test) on the Serial Monitor:
void setup()
{
Serial.begin(115200);
delay(1000); // give me time to bring up serial monitor
Serial.println("ESP32 Touch Test");
}void loop()
{
Serial.println(touchRead(T0)); // get value using T0
delay(1000);
}These capacitive touch sensor pins are mainly used to generate an external interrupt for waking up ESP32 from low power modes(deep sleep mode). Moreover, can also be used to control external peripherals like LED blinking or tuning on a DC motor, when a capacitive touch-interrupt is observed. So, let's have a look at How to Generate external interrupt by touching the ESP32 capacitive touch pins:
Here's the ESP32 Touch Interrupt Code:
const int CAPACITIVE_TOUCH_INPUT_PIN = T0; // GPIO pin 4
const int LED_OUTPUT_PIN = LED_BUILTIN;
const int TOUCH_THRESHOLD = 40; // turn on light if touchRead value < this threshold
volatile boolean _touchDetected = false;
void setup()
{
Serial.begin(115200);
pinMode(LED_OUTPUT_PIN, OUTPUT);
pinMode(LED_OUTPUT_PIN, LOW);
touchAttachInterrupt(CAPACITIVE_TOUCH_INPUT_PIN, touchDetected, TOUCH_THRESHOLD);
}
void touchDetected()
{
_touchDetected = true;
}
void loop()
{
if(_touchDetected)
{
Serial.println("Touch detected.");
_touchDetected = false;
Serial.println("blink the LED");
digitalWrite(LED_OUTPUT_PIN, HIGH);
delay(1000);
digitalWrite(LED_OUTPUT_PIN, LOW);
delay(1000);
}
}Let's understand the code by parts:
const int CAPACITIVE_TOUCH_INPUT_PIN = T0; // GPIO pin 4
const int LED_OUTPUT_PIN = LED_BUILTIN;
const int TOUCH_THRESHOLD = 40; // turn on light if touchRead value < this threshold
volatile boolean _touchDetected = false;void setup()
{
Serial.begin(115200);
pinMode(LED_OUTPUT_PIN, OUTPUT);
pinMode(LED_OUTPUT_PIN, LOW);
touchAttachInterrupt(CAPACITIVE_TOUCH_INPUT_PIN, touchDetected, TOUCH_THRESHOLD);
}void touchDetected()
{
_touchDetected = true;
}void loop()
{
if(_touchDetected)
{
Serial.println("Touch detected.");
_touchDetected = false;
Serial.println("blink the LED");
digitalWrite(LED_OUTPUT_PIN, HIGH);
delay(1000);
digitalWrite(LED_OUTPUT_PIN, LOW);
delay(1000);
}
}This concludes the tutorial; I hope you found this helpful and also hope to see you again with a new tutorial on ESP32.
Hello readers, I hope you all are doing great. Welcome to Section 5 of the ESP32 Programming Series. In this section, we are going to interface different Embedded Sensors with the ESP32 Microcontroller Board. ESP32 development board is featured with some inbuilt sensors(i.e. hall effect sensor, capacitive touch sensor) so, in the initial tutorials of this section, we will explore these built-in ESP32 sensors and in the later lectures, we will interface third-party sensors with the ESP32.
In today's lecture, we will discuss the working/operation of the ESP32 built-in Hall Effect Sensor. Hall Effect sensor is used to detect the variation in the magnetic field of its surroundings. So, let's first understand What's Hall Effect:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
The Hall Effect phenomenon was first discovered by Edwin Hall in 1879. When current passes through a conductor, the electrons move in a straight line and thus the voltage difference across the conductor's surface remains zero, as shown in the below figure:
However, when a magnet is placed near the current-carrying conductor in a way that the direction of the magnetic field is perpendicular to the flow of current, the electrons get diverted and don't follow a straight line, which results in generating a small potential difference across the conductor's surface, as shown in the below figure:
This small potential difference generated because of magnetic field presence is called Hall Voltage. This magnetic field influence over the current-carrying conductor is termed the Hall Effect.
A Hall Effect Sensor is a non-contact type embedded sensor, used to detect the presence & intensity of a magnetic field in its surroundings. Different third-party Hall Effect Sensors available in the market are shown in the below figure:
In ESP32, the Hall effect sensor is located inside the ESP-WROOM-32 metallic cover. As the Hall Effect sensor is a non-contact type, it doesn't have to be in contact with the magnet. We just need to place the magnet above this metallic sheet and the ESP32 Hall Effect sensor will detect it.
To understand the working of the Hall sensor with ESP32, let's test the builtin ESP32 example:
Here's the code for this ESP32 Hall Sensor example:
int val = 0;
void setup()
{
Serial.begin (9600);
}
void loop()
{
val = hallRead();
Serial.print ("sensor value = ");
Serial.println (val);//to graph
delay(100);
}The code is quite simple, where the hallRead() function is called to read the hall sensor value, store it into a variable and then print it on the Serial monitor. Finally added a small delay to get the next value. Let me explain the code line by line for the beginners:
int val = 0;void setup()
{
Serial.begin (9600);
}void loop()
{
val = hallRead();
Serial.print ("sensor value = ");
Serial.println (val);//to graph
delay(100);
}This concludes the tutorial. I hope you found this helpful, test it out and if feel any difficulty, let me know in the comments. In the next tutorial, we will have a look at another built-in sensor of ESP32 i.e. Capacitive Touch Sensor. Thanks for reading.
Hello readers, I hope you are all doing great. In this tutorial, we are going to discuss the OTA web updater on the ESP32.
We already covered the fundamentals of OTA programming in ESP32, in our previous tutorial where we used the Arduino IDE to upload OTA code into the ESP32 module using the network port.
In the OTA web updater, you need to create a web server page for OTA programming.
Fig.1 ESP32 OTA web updater
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig. 2
In this tutorial, we will discuss only the OTA web updater method using Arduino IDE and ESP32 dev-Kit V1 module.
If you want to know more about the basics of ESP32 and how to get started with Arduino IDE, then read Introduction to ESP32 Programming Series.
#include <WiFi.h> #include <WiFiClient.h> #include <WebServer.h> #include <ESPmDNS.h> #include <Update.h> const char* host = "esp32"; const char* ssid = "SSID"; const char* password = "password"; WebServer server(80); /* * Login page */ const char* loginIndex = "<form name='loginForm'>" "<table width='20%' bgcolor='A09F9F' align='center'>" "<tr>" "<td colspan=2>" "<center><font size=4><b>ESP32 Login Page</b></font></center>" "<br>" "</td>" "<br>" "<br>" "</tr>" "<td>Username:</td>" "<td><input type='text' size=25 name='userid'><br></td>" "</tr>" "<br>" "<br>" "<tr>" "<td>Password:</td>" "<td><input type='Password' size=25 name='pwd'><br></td>" "<br>" "<br>" "</tr>" "<tr>" "<td><input type='submit' onclick='check(this.form)' value='Login'></td>" "</tr>" "</table>" "</form>" "<script>" "function check(form)" "{" "if(form.userid.value=='admin' && form.pwd.value=='admin')" "{" "window.open('/serverIndex')" "}" "else" "{" " alert('Error Password or Username')/*displays error message*/" "}" "}" "</script>"; /* * Server Index Page */ const char* serverIndex = "<script src='https://ajax.googleapis.com/ajax/libs/jquery/3.2.1/jquery.min.js'></script>" "<form method='POST' action='#' enctype='multipart/form-data' id='upload_form'>" "<input type='file' name='update'>" "<input type='submit' value='Update'>" "</form>" "<div id='prg'>progress: 0%</div>" "<script>" "$('form').submit(function(e){" "e.preventDefault();" "var form = $('#upload_form')[0];" "var data = new FormData(form);" " $.ajax({" "url: '/update'," "type: 'POST'," "data: data," "contentType: false," "processData:false," "xhr: function() {" "var xhr = new window.XMLHttpRequest();" "xhr.upload.addEventListener('progress', function(evt) {" "if (evt.lengthComputable) {" "var per = evt.loaded / evt.total;" "$('#prg').html('progress: ' + Math.round(per*100) + '%');" "}" "}, false);" "return xhr;" "}," "success:function(d, s) {" "console.log('success!')" "}," "error: function (a, b, c) {" "}" "});" "});" "</script>"; /* * setup function */ void setup(void) { Serial.begin(115200); // Connect to WiFi network WiFi.begin(ssid, password); Serial.println(""); // Wait for connection while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.print("Connected to "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.localIP()); /*use mdns for host name resolution*/ if (!MDNS.begin(host)) { //http://esp32.local Serial.println("Error setting up MDNS responder!"); while (1) { delay(1000); } } Serial.println("mDNS responder started"); server.on("/", HTTP_GET, []() { server.sendHeader("Connection", "close"); server.send(200, "text/html", loginIndex); }); server.on("/serverIndex", HTTP_GET, []() { server.sendHeader("Connection", "close"); server.send(200, "text/html", serverIndex); }); /*handling uploading firmware file */ server.on("/update", HTTP_POST, []() { server.sendHeader("Connection", "close"); server.send(200, "text/plain", (Update.hasError()) ? "FAIL" : "OK"); ESP.restart(); }, []() { HTTPUpload& upload = server.upload(); if (upload.status == UPLOAD_FILE_START) { Serial.printf("Update: %s\n", upload.filename.c_str()); if (!Update.begin(UPDATE_SIZE_UNKNOWN)) { //start with max available size Update.printError(Serial); } } else if (upload.status == UPLOAD_FILE_WRITE) { /* flashing firmware to ESP*/ if (Update.write(upload.buf, upload.currentSize) != upload.currentSize) { Update.printError(Serial); } } else if (upload.status == UPLOAD_FILE_END) { if (Update.end(true)) { //true to set the size to the current progress Serial.printf("Update Success: %u\nRebooting...\n", upload.totalSize); } else { Update.printError(Serial); } } }); server.begin(); } void loop(void) { server.handleClient(); delay(1); }
Fig. 4
Fig. 6
Fig. 7
Fig. 9
Fig. 10
Fig. 12
Fig. 13
Fig. 14
Fig. 16
Fig. 17
#include <WiFi.h> #include <WiFiClient.h> #include <WebServer.h> #include <ESPmDNS.h> #include <Update.h> const char* host = "esp32"; const char* ssid = "SSID"; const char* password = "password"; //variabls to blink without delay: const int led = 2; unsigned long previousMillis = 0; // will store last time LED was updated const long interval = 1000; // interval at which to blink (milliseconds) int ledState = LOW; // ledState used to set the LED WebServer server(80); /* * Login page */ const char* loginIndex = "<form name='loginForm'>" "<table width='20%' bgcolor='A09F9F' align='center'>" "<tr>" "<td colspan=2>" "<center><font size=4><b>ESP32 Login Page</b></font></center>" "<br>" "</td>" "<br>" "<br>" "</tr>" "<td>Username:</td>" "<td><input type='text' size=25 name='userid'><br></td>" "</tr>" "<br>" "<br>" "<tr>" "<td>Password:</td>" "<td><input type='Password' size=25 name='pwd'><br></td>" "<br>" "<br>" "</tr>" "<tr>" "<td><input type='submit' onclick='check(this.form)' value='Login'></td>" "</tr>" "</table>" "</form>" "<script>" "function check(form)" "{" "if(form.userid.value=='admin' && form.pwd.value=='admin')" "{" "window.open('/serverIndex')" "}" "else" "{" " alert('Error Password or Username')/*displays error message*/" "}" "}" "</script>"; /* * Server Index Page */ const char* serverIndex = "<script src='https://ajax.googleapis.com/ajax/libs/jquery/3.2.1/jquery.min.js'></script>" "<form method='POST' action='#' enctype='multipart/form-data' id='upload_form'>" "<input type='file' name='update'>" "<input type='submit' value='Update'>" "</form>" "<div id='prg'>progress: 0%</div>" "<script>" "$('form').submit(function(e){" "e.preventDefault();" "var form = $('#upload_form')[0];" "var data = new FormData(form);" " $.ajax({" "url: '/update'," "type: 'POST'," "data: data," "contentType: false," "processData:false," "xhr: function() {" "var xhr = new window.XMLHttpRequest();" "xhr.upload.addEventListener('progress', function(evt) {" "if (evt.lengthComputable) {" "var per = evt.loaded / evt.total;" "$('#prg').html('progress: ' + Math.round(per*100) + '%');" "}" "}, false);" "return xhr;" "}," "success:function(d, s) {" "console.log('success!')" "}," "error: function (a, b, c) {" "}" "});" "});" "</script>"; /* * setup function */ void setup(void) { pinMode(led, OUTPUT); Serial.begin(115200); // Connect to WiFi network WiFi.begin(ssid, password); Serial.println(""); // Wait for connection while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.print("Connected to "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.localIP()); /*use mdns for host name resolution*/ if (!MDNS.begin(host)) { //http://esp32.local Serial.println("Error setting up MDNS responder!"); while (1) { delay(1000); } } Serial.println("mDNS responder started"); /*return index page which is stored in serverIndex */ server.on("/", HTTP_GET, []() { server.sendHeader("Connection", "close"); server.send(200, "text/html", loginIndex); }); server.on("/serverIndex", HTTP_GET, []() { server.sendHeader("Connection", "close"); server.send(200, "text/html", serverIndex); }); /*handling uploading firmware file */ server.on("/update", HTTP_POST, []() { server.sendHeader("Connection", "close"); server.send(200, "text/plain", (Update.hasError()) ? "FAIL" : "OK"); ESP.restart(); }, []() { HTTPUpload& upload = server.upload(); if (upload.status == UPLOAD_FILE_START) { Serial.printf("Update: %s\n", upload.filename.c_str()); if (!Update.begin(UPDATE_SIZE_UNKNOWN)) { //start with max available size Update.printError(Serial); } } else if (upload.status == UPLOAD_FILE_WRITE) { /* flashing firmware to ESP*/ if (Update.write(upload.buf, upload.currentSize) != upload.currentSize) { Update.printError(Serial); } } else if (upload.status == UPLOAD_FILE_END) { if (Update.end(true)) { //true to set the size to the current progress Serial.printf("Update Success: %u\nRebooting...\n", upload.totalSize); } else { Update.printError(Serial); } } }); server.begin(); } void loop(void) { server.handleClient(); delay(1); //loop to blink without delay unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= interval) { // save the last time you blinked the LED previousMillis = currentMillis; // if the LED is off turn it on and vice-versa: ledState = not(ledState); // set the LED with the ledState of the variable: digitalWrite(led, ledState); } }
Fig. 19
Fig. 20
Fig. 21 bin file
Fig. 23 LED blink
This concludes the tutorial. I hope, you found this helpful and I hope to see you soon for the new ESP32 tutorial.
Hello readers, hope you all are doing great. In this tutorial, we are going to discuss a mechanism that allows users to update the ESP32 with a new program wirelessly or over the air (without using a USB cable to upload a new program).
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig. 2 OTA programming for IoT
There are two methods of OTA implementation.
In this tutorial, we will discuss only the basic OTA method using Arduino IDE and ESP32 module.
If you want to know more about the basics of ESP32 and how to get started with Arduino IDE, then follow the tutorial Introduction to ESP32 Programming Series.
To implement the Basic OTA method, an example is available is Arduino IDE.
#include <WiFi.h> #include <ESPmDNS.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> const char* ssid = "SSID"; const char* password = "Password"; void setup() { Serial.begin(115200); Serial.println("Booting"); WiFi.mode(WIFI_STA); WiFi.begin(ssid, password); while (WiFi.waitForConnectResult() != WL_CONNECTED) { Serial.println("Connection Failed! Rebooting..."); delay(5000); ESP.restart(); } ArduinoOTA.onStart([]() { String type; if (ArduinoOTA.getCommand() == U_FLASH) type = "sketch"; else // U_SPIFFS type = "filesystem"; // NOTE: if updating SPIFFS this would be the place to unmount SPIFFS using SPIFFS.end() Serial.println("Start updating " + type); }) .onEnd([]() { Serial.println("\nEnd"); }) .onProgress([](unsigned int progress, unsigned int total) { Serial.printf("Progress: %u%%\r", (progress / (total / 100))); }) .onError([](ota_error_t error) { Serial.printf("Error[%u]: ", error); if (error == OTA_AUTH_ERROR) Serial.println("Auth Failed"); else if (error == OTA_BEGIN_ERROR) Serial.println("Begin Failed"); else if (error == OTA_CONNECT_ERROR) Serial.println("Connect Failed"); else if (error == OTA_RECEIVE_ERROR) Serial.println("Receive Failed"); else if (error == OTA_END_ERROR) Serial.println("End Failed"); }); ArduinoOTA.begin(); Serial.println("Ready"); Serial.print("IP address: "); Serial.println(WiFi.localIP()); } void loop() { ArduinoOTA.handle(); }
Fig. 11 Serial monitor
#include <WiFi.h> #include <ESPmDNS.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> const char* ssid = "public"; const char* password = "ESP32@123"; //variabls for blinking an LED with Millis const int led = 2; // ESP32 Pin to which onboard LED is connected unsigned long previousMillis = 0; // will store last time LED was updated const long interval = 1000; // interval at which to blink (milliseconds) int ledState = LOW; // ledState used to set the LED void setup() { pinMode(led, OUTPUT); Serial.begin(115200); Serial.println("Booting"); WiFi.mode(WIFI_STA); WiFi.begin(ssid, password); while (WiFi.waitForConnectResult() != WL_CONNECTED) { Serial.println("Connection Failed! Rebooting..."); delay(5000); ESP.restart(); } ArduinoOTA .onStart([]() { String type; if (ArduinoOTA.getCommand() == U_FLASH) type = "sketch"; else // U_SPIFFS type = "filesystem"; // NOTE: if updating SPIFFS this would be the place to unmount SPIFFS using SPIFFS.end() Serial.println("Start updating " + type); }) .onEnd([]() { Serial.println("\nEnd"); }) .onProgress([](unsigned int progress, unsigned int total) { Serial.printf("Progress: %u%%\r", (progress / (total / 100))); }) .onError([](ota_error_t error) { Serial.printf("Error[%u]: ", error); if (error == OTA_AUTH_ERROR) Serial.println("Auth Failed"); else if (error == OTA_BEGIN_ERROR) Serial.println("Begin Failed"); else if (error == OTA_CONNECT_ERROR) Serial.println("Connect Failed"); else if (error == OTA_RECEIVE_ERROR) Serial.println("Receive Failed"); else if (error == OTA_END_ERROR) Serial.println("End Failed"); }); ArduinoOTA.begin(); Serial.println("Ready"); Serial.print("IP address: "); Serial.println(WiFi.localIP()); } void loop() { ArduinoOTA.handle(); //loop to blink without delay unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= interval) { // save the last time you blinked the LED previousMillis = currentMillis; // if the LED is off turn it on and vice-versa: ledState = not(ledState); // set the LED with the ledState of the variable: digitalWrite(led, ledState); } }
Note: It is required to upload the OTA programming handler code every time you upload a new code into ESP32 over the air. So that, OTA programming remains enabled for future use.
This concludes the tutorial. I hope you found this helpful. In the next tutorial, we will discuss the OTA web updater in ESP32.
Hello readers, hope you all are doing great. In this tutorial, we will discuss low power modes in ESP32, their purpose and their implementation to increase the battery life by reducing power consumption.
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig.1
Along with multiple wireless and processing features, ESP32 also provides us with a power-saving feature by offering sleep modes. When you are powering the ESP32 module from the live supply using an adaptor or a USB cable, there is nothing to worry about power consumption. But when you are using a battery, as a power source to ESP32, you need to manage the power consumption for longer battery life.
When ESP32 is in sleep mode, a small amount of power is required to maintain the state of ESP32 in RAM (random access memory) and retain necessary data. Meanwhile, the power supply won’t be consumed by any unnecessary peripheral or inbuilt modules like Wi-Fi and Bluetooth.
ESP32 offers 5 power modes. Each mode is configurable and offers different power-saving capabilities:
Fig. 2
Fig 3
For a better understanding of low power modes in ESP32, we are going to implement deep sleep mode in esp32 and will also discuss how to wake up the device from deep sleep mode.
To implement deep sleep modes we are going to use another ESP32 feature that is Capacitive Touch Sensing pins. These pins can sense the presence of a body that holds an electric charge.
So we are going to use these touch-sensitive pins for waking up ESP32 from deep sleep mode using the Arduino IDE compiler.
In Arduino IDE examples are given for deep sleep mode with various wake-up methods.
#define Threshold 40 /* Greater the value, more the sensitivity */ RTC_DATA_ATTR int bootCount = 0; touch_pad_t touchPin; /* Method to print the reason by which ESP32 has been awaken from sleep */ void print_wakeup_reason(){ esp_sleep_wakeup_cause_t wakeup_reason; wakeup_reason = esp_sleep_get_wakeup_cause(); switch(wakeup_reason) { case ESP_SLEEP_WAKEUP_EXT0 : Serial.println("Wakeup caused by external signal using RTC_IO"); break; case ESP_SLEEP_WAKEUP_EXT1 : Serial.println("Wakeup caused by external signal using RTC_CNTL"); break; case ESP_SLEEP_WAKEUP_TIMER : Serial.println("Wakeup caused by timer"); break; case ESP_SLEEP_WAKEUP_TOUCHPAD : Serial.println("Wakeup caused by touchpad"); break; case ESP_SLEEP_WAKEUP_ULP : Serial.println("Wakeup caused by ULP program"); break; default : Serial.printf("Wakeup was not caused by deep sleep: %d\n",wakeup_reason); break; } } /* Method to print the touchpad by which ESP32 has been awaken from sleep */ void print_wakeup_touchpad(){ touchPin = esp_sleep_get_touchpad_wakeup_status(); switch(touchPin) { case 0 : Serial.println("Touch detected on GPIO 4"); break; case 1 : Serial.println("Touch detected on GPIO 0"); break; case 2 : Serial.println("Touch detected on GPIO 2"); break; case 3 : Serial.println("Touch detected on GPIO 15"); break; case 4 : Serial.println("Touch detected on GPIO 13"); break; case 5 : Serial.println("Touch detected on GPIO 12"); break; case 6 : Serial.println("Touch detected on GPIO 14"); break; case 7 : Serial.println("Touch detected on GPIO 27"); break; case 8 : Serial.println("Touch detected on GPIO 33"); break; case 9 : Serial.println("Touch detected on GPIO 32"); break; default : Serial.println("Wakeup not by touchpad"); break; } } void callback(){ //placeholder callback function } void setup(){ Serial.begin(115200); delay(1000); //Take some time to open up the Serial Monitor //Increment boot number and print it every reboot ++bootCount; Serial.println("Boot number: " + String(bootCount)); //Print the wakeup reason for ESP32 and touchpad too print_wakeup_reason(); print_wakeup_touchpad(); //Setup interrupt on Touch Pad 3 (GPIO15) touchAttachInterrupt(T3, callback, Threshold); //Configure Touchpad as wakeup source esp_sleep_enable_touchpad_wakeup(); //Go to sleep now Serial.println("Going to sleep now"); esp_deep_sleep_start(); Serial.println("This will never be printed"); } void loop(){ //This will never be reached }
Fig 12
Fig. 13 waking up esp32 using capacitive sensitive GPIO pin
We have attached a screenshot from the serial monitor for reference.Fig. 14
#define uS_TO_S_FACTOR 1000000ULL /* Conversion factor for micro seconds to seconds */ #define TIME_TO_SLEEP 5 /* Time ESP32 will go to sleep (in seconds) */ RTC_DATA_ATTR int bootCount = 0; /* Method to print the reason by which ESP32 has been awaken from sleep */ void print_wakeup_reason(){ esp_sleep_wakeup_cause_t wakeup_reason; wakeup_reason = esp_sleep_get_wakeup_cause(); switch(wakeup_reason) { case ESP_SLEEP_WAKEUP_EXT0 : Serial.println("Wakeup caused by external signal using RTC_IO"); break; case ESP_SLEEP_WAKEUP_EXT1 : Serial.println("Wakeup caused by external signal using RTC_CNTL"); break; case ESP_SLEEP_WAKEUP_TIMER : Serial.println("Wakeup caused by timer"); break; case ESP_SLEEP_WAKEUP_TOUCHPAD : Serial.println("Wakeup caused by touchpad"); break; case ESP_SLEEP_WAKEUP_ULP : Serial.println("Wakeup caused by ULP program"); break; default : Serial.printf("Wakeup was not caused by deep sleep: %d\n",wakeup_reason); break; } } void setup(){ Serial.begin(115200); delay(1000); //Take some time to open up the Serial Monitor //Increment boot number and print it every reboot ++bootCount; Serial.println("Boot number: " + String(bootCount)); //Print the wakeup reason for ESP32 print_wakeup_reason(); /* First we configure the wake up source We set our ESP32 to wake up every 5 seconds */ esp_sleep_enable_timer_wakeup(TIME_TO_SLEEP * uS_TO_S_FACTOR); Serial.println("Setup ESP32 to sleep for every " + String(TIME_TO_SLEEP) + " Seconds"); /* Next we decide what all peripherals to shut down/keep on By default, ESP32 will automatically power down the peripherals not needed by the wakeup source, but if you want to be a poweruser this is for you. Read in detail at the API docs http://esp-idf.readthedocs.io/en/latest/api-reference/system/deep_sleep.html Left the line commented as an example of how to configure peripherals. The line below turns off all RTC peripherals in deep sleep. */ //esp_deep_sleep_pd_config(ESP_PD_DOMAIN_RTC_PERIPH, ESP_PD_OPTION_OFF); //Serial.println("Configured all RTC Peripherals to be powered down in sleep"); /* Now that we have setup a wake cause and if needed setup the peripherals state in deep sleep, we can now start going to deep sleep. In the case that no wake up sources were provided but deep sleep was started, it will sleep forever unless hardware reset occurs. */ Serial.println("Going to sleep now"); Serial.flush(); esp_deep_sleep_start(); Serial.println("This will never be printed"); } void loop(){ //This is not going to be called }
Fig 15
Fig. 16
Fig. 17
Fig. 18
Fig. 19
Fig 20
This concludes the tutorial. I hope you found this useful, and I hope to see you soon for the new ESP32 tutorial.
Hello readers, I hope you all are doing great. Welcome to the 3rd Lecture of Section 2 in the ESP32 Programming Series. In this tutorial, we are going to discuss another important feature of ESP32 i.e. PWM(Pulse Width Modulation).
Pulse Width Modulation is a technique to reduce the voltage by pulsating it. In today's lecture, we will first understand the basic concept of PWM, and after that will design two projects to fully grasp it. In the first project, we will control the brightness of an LED, while in the second one, we will control the speed of a DC Motor.
Before going forward, let's first have a look at the PWM working:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
PWM is used to control the power delivered to the load by pulsating the ON-Time of the voltage pulse, without causing any power loss. Let's understand the PWM concept with the help of below image:
Suppose a DC Motor runs at 200RPM over 5V. Now, if we want to reduce its speed to 100 RPM, we need to reduce its input voltage to 2.5V(approx). So, either we can replace the 5V battery with a 2.5V Battery or use a PWM circuit to reduce the voltage level from 5V to 2.5V. In this specific case, the PWM pulse will be ON for 50% of the time and get OFF for the remaining 50% of the time.
The behavior of the PWM signal is determined by the following factors:
As you can see in the below figure, we have taken two signals for a duration of 1 second. The first signal completes 10 Cycles in 1 second, so we can say it has a frequency of 10Hz, while the second one has a frequency of 5Hz as it completes 5 cycles in 1 second. So, I hope now it's clear that the number of cycles per second is the frequency of a signal.
Duty Cycle is the ratio of ON time(when the signal is high) to the total time taken to complete the cycle. The duty cycle is represented in the form of a percentage (%) or ratio. Let's understand the PWM Duty Cycle with the help of below image:
The resolution of a PWM signal defines the number of steps it can have from zero power to full power. The resolution of the PWM signal is configurable for example, the ESP32 module has a 1-16 bit resolution, which means we can configure maximum a of 65536 (2^16) steps from zero to full power.
In the ESP WROOM-32 module, there are 16 PWM channels. All the channels are divided into two groups containing 8 channels in each group. The resolution can be programmed between 1 to 16 bits and frequency also depends upon the programmed resolution of the PWM signal.
Now
For the demonstration of PWM in ESP32 we are going to explain two examples:
We are using Arduino IDE to compile and upload the code into the ESP WROOM-32 board.
// Global variable declaration to set PWM properties
const int ledChannel = 0; // select channel 0
const int resolution = 8; //8-bit resolutin i.e., 0-255
const int frequency = 5000; // set frequency in Hz
int dutyCycle = 0;
void setup()
{
Serial.begin(115200);
ledcSetup(ledChannel, frequency, resolution); // configure LED PWM functionalities
ledcAttachPin(LED_BUILTIN, ledChannel); // attach the channel to the GPIO to be controlled
}
void loop()
{
while(dutyCycle <200)
{
ledcWrite(ledChannel, dutyCycle++); // changing the LED brightness with PWM
Serial.print(" duty Cycle ++ :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
while(dutyCycle>0)
{
ledcWrite(ledChannel, dutyCycle--); // changing the LED brightness with PWM
Serial.print(" duty Cycle -- :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
}
// Global variable declaration to set PWM properties
const int ledChannel = 0; // select channel 0
const int resolution = 8; //8-bit resolutin i.e., 0-255
const int frequency = 5000; // set frequency in Hz
int dutyCycle = 0;
Serial.begin(115200);
ledcSetup(ledChannel, frequency, resolution); // configure LED PWM functionalities
ledcAttachPin(LED_BUILTIN, ledChannel); // attach the channel to the GPIO to be controlled
while(dutyCycle <200)
{
ledcWrite(ledChannel, dutyCycle++); // changing the LED brightness with PWM
Serial.print(" duty Cycle ++ :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
while(dutyCycle>0)
{
ledcWrite(ledChannel, dutyCycle--); // changing the LED brightness with PWM
Serial.print(" duty Cycle -- :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
Fig. 9 Serial plotter PWM output
Fig. 10
In this example, we are going to implement PWM using ESP WROOM-32 to control the speed of a DC motor.
The speed of the DC motor depends upon the input power supply. So, by varying the power input we can also vary (increase or decrease) the speed of DC motor.
Hardware components required:
L298N motor driver: A motor driver is used between the ESP32 board and DC motor to resolve the power compatibility issues.
Both the ESP32 board and DC motor operate at different power ratings due to which you can not connect the two devices directly. So a motor driver is used to receive a low power input from the ESP32 board and drive/run DC motor at slightly high power.
L298N can drive a DC motor that operated between 5 to 35 voltage range and maximum current of 2A.
There are various DC motor drivers available in the market for example L293D, DRV8833, MAX14870 single brushed motor driver etc. You can choose the driver of your choice depending upon the application and power ratings.
Fig. 11
FIG. 12 IC L298N pin-out
| IN_1 | IN_2 | Rotation |
| HIGH | LOW | DC motor rotates in a clockwise direction |
| LOW | HIGH | The motor rotates in an anti-clockwise direction |
| LOW | LOW | Motor STOP |
| HIGH | HIGH | Motor STOP |
Table 1
//configure GPIO pins to connect motor driver
int enable1Pin = 14;
int M_Pin1 = 26;
int M_Pin2 = 27;
// Setting PWM properties
const int freq = 10000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 150;
void setup()
{
Serial.begin(115200);
// sets the pins as outputs:
pinMode(M_Pin1, OUTPUT);
pinMode(M_Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
//Configure LED PWM functionalities
ledcSetup(pwmChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(enable1Pin, pwmChannel);
Serial.print("Testing DC Motor...");
}
void loop()
{
// Move the DC motor in anti-clockwise direction at maximum speed
Serial.println("Moving reverse");
digitalWrite(M_Pin1, LOW);
digitalWrite(M_Pin2, HIGH);
delay(500);
// Move DC motor forward with increasing speed
Serial.println("Moving Forward");
digitalWrite(M_Pin1, HIGH);
digitalWrite(M_Pin2, LOW);
//----while loop----
while (dutyCycle <= 255)
{
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Speed increasing with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle +5;
delay(100);
}
while (dutyCycle >150)
{
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Speed decreasing with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle -5;
delay(100);
}
// _____Stop the DC motor
Serial.println("STOP DC motor");
digitalWrite(M_Pin1, LOW);
digitalWrite(M_Pin2, LOW);
delay(500);
}
//configure GPIO pins to connect motor driver
int enable1Pin = 14;
int M_Pin1 = 26;
int M_Pin2 = 27;
// Setting PWM properties
const int freq = 10000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 150;
Serial.begin(115200);
// sets the pins as outputs:
pinMode(M_Pin1, OUTPUT);
pinMode(M_Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
//Configure LED PWM functionalities
ledcSetup(pwmChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(enable1Pin, pwmChannel);
Fig. 20
Fig. 21 Increasing speed
Fig. 22 Reducing speed
Fig. 23 STOP DC motor
Fig. 24 PWM output on serial monitor
Fig. 25 PWM output on Serial Plotter
This concludes the tutorial. I hope you found this useful, and I hope to see you soon for the new ESP32 tutorial.Hello readers, hope you all are doing great. In this tutorial, we will discuss another ESP32 protocol that is Web Socket and we will also explain how to create a web server using web socket protocol with ESP32. So, we will have a look at What is a web socket server, How web socket protocol is different from HTTP protocol, What is handshaking in networking, Three-way handshaking, Web socket application, Creating web socket server using ESP32 module etc. Let's get started:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig 1 Web-socket server
A Web Socket is a full-duplex (both the server and the client can send and receive data at the same time) computer communication protocol. Web socket protocol, like HTTP (hypertext transfer protocol), also works in server and client communication format. A web socket uses a process known as handshaking to establish communication between the server and client. This protocol is also known as the stateful protocol. When a client device requests communication with the server, a connection is established between the server and the client, and the connection remains in place until either the server or the client terminates it.
Fig. 2 HTTP protocol
Fig. 3 web socket protocol
In TCP/IP (transmission control protocol/ internet protocol) network, three-way handshaking is used to create a communication channel between server and client.
Three-way handshaking steps are:
Fig. 5 Three-way handshaking
Web socket is used in real-time applications where a client is required to respond quickly to a change or update. The various web socket applications are:
To create a web socket server using ESP32 we are using Arduino IDE as a compiler. Arduino IDE will compile the code and will also upload the compiled code into the ESP32 hardware module.
If you are not familiar with using the Arduino IDE compiler for ESP32 programming then follow our #1 tutorial that is about Introduction to ESP32 programming series.
https://github.com/me-no-dev/AsyncTCP
https://github.com/me-no-dev/ESPAsyncWebServer
Follow our tutorial Introduction to ESP32 programming series to learn about adding a library in Arduino IDE.
Fig. 6 Libraries
Fig. 10 <style> tag
Fig: 11 Styling the button
Fig. 12 <body> tag
Fig. 13 script tag
Fig 14 initWebSocket()
Fig. 15 Update LED status on the web page
Fig. 16 Notify clients
Fig. 17 handles web (client) socket message
Fig. 19 Placeholder
Fig. 20
Fig. 21 Wifi status
Fig. 22
Fig. 23
Fig. 24
Fig 26 Arduino IDE Serial monitor
Fig. 27 Web page displaying LED status HIGH
Fig 28 Web page displaying LED status LOW
Fig. 29 ESP32 LED HIGH
This concludes the tutorial. I hope you find it helpful. In our next tutorial, we will discuss PWM (pulse width modulation) using ESP32.
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig 1 Interrupt
Polling is a process that performs continuous monitoring. Basically, the processor continuously monitors the state of a specific device or a peripheral, and when the status of the device satisfies the condition, the device executes the task that was required. Then it moves on to the next device to monitor until each one has been served. The processor performs no other operations and devotes all of its processing time to monitoring, and all other tasks are suspended until the current one is completed.
Fig 2 polling vs Interrupt
So, to overcome the disadvantage of the polling method, we chose the Interrupt method.
ESP32 module has a dual-core processor and each core consists of 32 interrupts. Basically interrupts are of two types:
Fig 3 ESP32 software interrupt
Software interrupts are internal which occur in response to the execution of a software instruction. For example, a timer can be used to generate a software interrupt.
Fig 4 ESP32 software interrupt
Hardware interrupts are the external interrupts that are caused by an external event. For example, an external push button connected to ESP32’s GPIO or a motion sensor will generate an interrupt (event) if a motion is detected.
When an interrupt occurs during normal program execution, an ISR (interrupt service routine) or an interrupt handler is called into action. The normal program execution will be halted, and the interrupt will be executed based on the priority level of the interrupt.
Fig. 5 Interrupt service routing
Every interrupt has a fixed memory location where the address of the ISR is stored.Interrupt Vector Table refers to a memory table or memory table that is used to store the location of an interrupt service routine.
Note: IRAM_ATTR attribute should be defined for interrupt handling. As per the ESP32 datasheet interrupt service routine should run inside the RAM. Because inside the RAM it is fast to execute a code than in flash memory and when an interrupt occurs all the other tasks will be blocked or halted till the time interrupt request is served.
When an interrupt occurs, the microcontroller will go through the following steps:
Fig. 6 ESP32 Interrupt Program flow
We are using Arduino IDE to compile the code and then upload into the ESP32 board.
If you are not familiar with the procedure of getting started with Arduino IDE and hoe to compile a code in Arduino IDE then follow our previous tutorial that is Introduction to ESP32 programming series.
// Set GPIOs for LED and Push button const int led = 2; const int button = 0; // Timer: Auxiliary variables #define timeSeconds 10 unsigned long now = millis(); unsigned long lastTrigger = 0; boolean startTimer = false; // Checks if button input was detected, sets LED HIGH and starts a timer void IRAM_ATTR buttonInput() { Serial.println("input is available !!!"); digitalWrite(led, HIGH); startTimer = true; lastTrigger = millis(); } void setup() { // Serial port for debugging purposes Serial.begin(115200); pinMode(button, INPUT_PULLUP); attachInterrupt(digitalPinToInterrupt(button), buttonInput, RISING); // Set LED to LOW pinMode(led, OUTPUT); digitalWrite(led, LOW); } void loop() { now = millis(); // Turn off the LED after the number of seconds defined in the timeSeconds variable if(startTimer && (now - lastTrigger > (timeSeconds*500))) { digitalWrite(led, LOW); startTimer = false; } }
As we have already discussed that the interrupt could be software generated (internal interrupt) or due to hardware (external interrupt). This tutorial we are using hardware or external interrupt for demonstration. You can also use software interrupts or both in a single code, as per your requirements.
Fig. 7
In this code, we are using timer to add delay instead of using delay() function.(I will also explain that why it is preferred to use timer in order to create delay instead of using delay() function after the code demonstration).
Inside the loop function which is continuously running, the buttonInput function will be called every time when an interrupt occurs , which we have defined previously inside the setup() function.
Fig 14 Serial monitor
Delay() function is a complete software process and it is mostly used because it is easier to implement delay using only software. On the other hand, when we switch to hardware delay or use a timer to add delay the process is a bit complicated to implement.
But, when we think of a practical perspective we prefer hardware delay over software delay. Because a software delay keeps the processor busy in a continuous loop and the processor need to keep all other tasks on halt.
On the other hand, if we use a timer to add delay the processor can complete some other task while the timer is playing its own part.
This concludes the tutorial. Hope you find it helpful. In our next tutorial, we will discuss the ESP32 Web Socket server.
ESP32 can be operated as an access point (AP) or a Wi-Fi station (STA mode). So, in this tutorial, we will create an ESP32 web server in access point (AP) mode. Here's the video demonstration of ESP32 WebServer in Access Point Mode:
As I mentioned above, in our 2nd tutorial, we already discussed the basics of the ESP32 web server. So, in this tutorial, we will only discuss how to create the ESP32 in access point mode.
For detailed information about the basics of the ESP32 web server and how client-server communication takes place, follow our previous tutorial (i.e., Create a Web Server with ESP32).
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
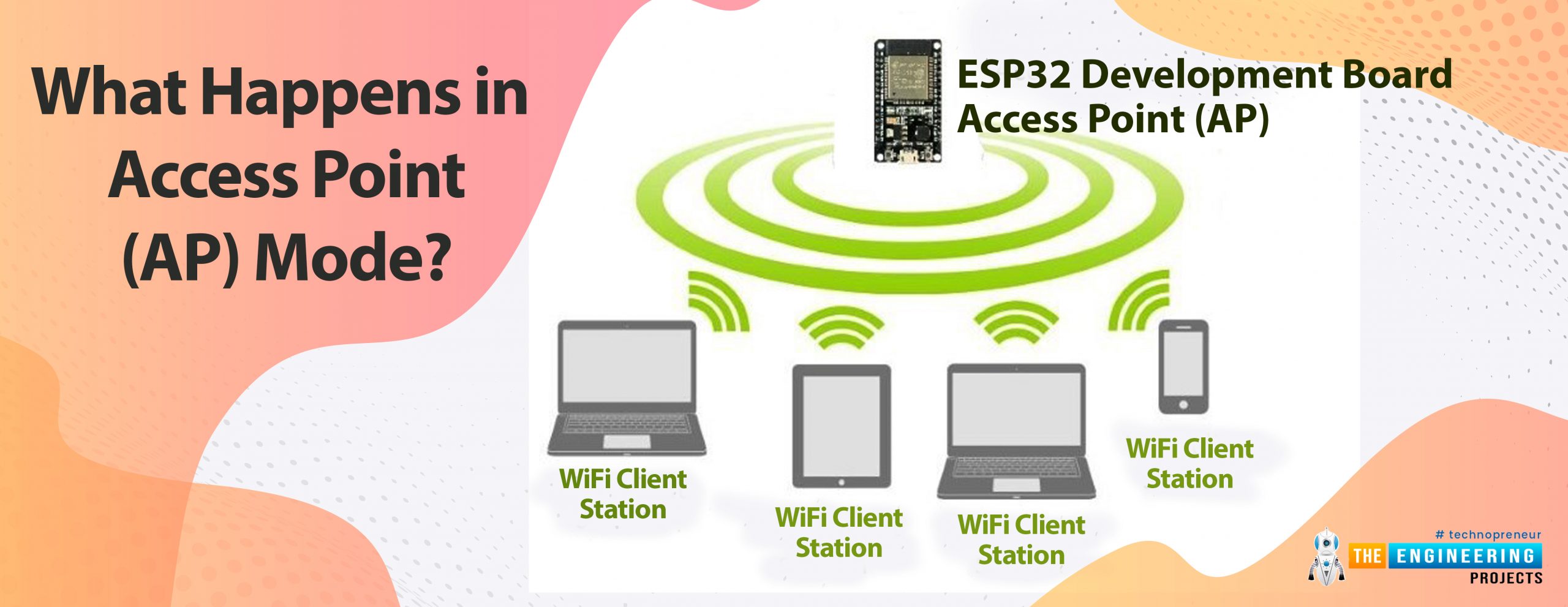
In Access Point Mode the ESP32 creates its own wireless Wi-Fi network in this mode, similar to the one provided by your existing router. In access point mode, we don't need to connect the ESP2 to a Wi-Fi network. In the Wi-Fi network it creates, the ESP32 Wi-Fi board can connect up to 5 devices.
Fig 1 ESP32 as an Access Point
So, in access point mode, nearby Wi-Fi devices such as mobile phones, laptops, or a secondary ESP32 module acting as a station can connect directly to the AP (ESP32 module) without the need for an external Wi-Fi router.
On the other hand, in Station mode, the ESP32 wi-fi module connects to your Wi-Fi network through a router. The router acts as a conduit for communication between the web client and the ESP32. The Wi-Fi router provides the IP address. This IP address can be used by web clients to connect to the Web server on a local network.
To know about how to set up/operate Arduino IDE for ESP32 compilation, follow our first tutorial i.e., Introduction to ESP32 programming series.
Here we are using an inbuilt example from Arduino IDE(ESP32). You can modify the example code as per your requirements or can write your own code.
A screenshot is attached below to help you find the example code in Arduino IDE.
Fig 2 Wi-Fi access point example
The first task while writing the WiFi code is to add the required wifi header files or libraries in the code.
Here we are adding three libraries.
Fig 3: Libraries
Define the LED pin or a GPIO (for peripheral interface) which we going to control through web server. Here we are using the inbuilt LED which is internally connected with GPIO2
Give a name (SSID) to the ESP32 Access Point and set the password for security purpose ( if you wish to).
While creating a web server we also need to assign a port and usually port 80 is used for local web server.
Inside the setup function, the LED pin is initialized as an output one and then initialized the serial monitor with a baud rate of 115200.
The next task is to configure the ESP32 Wi-Fi module in access point mode. For that, here we are calling a function called WiFi.softAP. Where we are passing two parameters, ssid and password, respectively.
After configuring the AP mode, we need to fetch the IP address of the access point by calling the WiFi.softAPIP() function and printing it on the serial monitor.
Then, after fetching the IP address, we will start the server using the server. perform.
After configuring the Access Point mode and initializing the server, the server will next wait for the station or client connection, which can be a mobile phone, a laptop, or another ESP32 board configured in STA mode.
Once the connection is established between the access point and the client device, the access point will wait for the data input.
A string type variable called currentLine has been defined to hold the incoming data from the client.
If there is a byte to be read from the client, then it will be stored inside the char type variable c.
HTTP header always starts with a response code e.g.: HTTP/1.1 200 ok
An HTML page will be created on the client’s browser, from where the client device can control (ON/OFF) the LED.
Different URLs will be created to turn ON and OFF the LED depending upon the HTML input received from the client device i.e., H (to turn ON the LED) and L ( to turn OFF the LED).
Client.stop() function is responsible for closing the connection between Access Point and client or station device.
Note: If you need any guidance regarding how to upload or compile a code for the ESP32 module in Arduino IDE, follow our first tutorial on the ESP32 programming series.
Here we are going to control the ESP32’s inbuilt LED through an ESP32 web server (AP mode).
We will connect our station or client device through Wi-Fi to the ESP32 module, which (ESP32) is currently acting as an access point (AP).
To establish the connection go to your mobile phone’s Wi-Fi setting.
The Access Point is advertising itself with a pre-defined SSID so that the station devices or clients can find the AP device and can communicate with each other.
If you find a wi-fi device (AP) named ESP32_AP (or as per your SSID) connect to that after entering the assigned password.
Fig. Connected with ESP32 AP
As we are using the inbuilt LED, no external components are required.
After connecting to the access point, you can find the IP address of the AP device printed on the Serial Monitor. As shown in the image below:
Fig.: Serial Monitor
Enter the IP address in the browser. Now you can turn the LED ON or OFF using the web page as shown in the images below.
A web page with URL 192.168.4.1/H will be displayed on the browser when LED is turned ON
Fig.: URL when LED is turned ON
LED is blue color represents the inbuilt LED which is connected to GPIO_2.
Fig.: ESP32 LED ON
Another web page with URL 192.168.4.1/L will be created when the AP will receive the input to turn OFF the inbuilt LED. As shown in the image below:
Fig.: Web page displaying the LED off state.
This concludes today’s tutorial. We hope you find it helpful.
In our next tutorial, we will discuss another ESP32 feature that is BLE (Bluetooth low energy).
Hello readers, I hope you all are doing well. Welcome to the Section 2 (ESP32 Features) of the ESP32 Programming Series. ESP32 is equipped with numerous built-in features and in each chapter of this Section 2, we will explore one of these ESP32 features in detail.
In the previous Section(Section 1: ESP32 IDEs), we installed different software IDEs to program ESP32 boards. Among these IDEs, we are going to use Arduino IDE for programming ESP32. So, I hope all of your tools are configured properly and you are ready to explore the built-in features of ESP32.
Today's the 1st Chapter of Section 2, and here we will discuss How to communicate with ESP32 Bluetooth Classic from a smartphone using Arduino IDE.
Here's the video tutorial for ESP32 Bluetooth Classic:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
ESP32 is equipped with 3 wireless communication protocols:
Before going forward, let's first have a look at the basic features of BT Classic:
Bluetooth is a short-range communication(wireless) technology, used in electronic devices(i.e. mobile phones, computers, LED, headphones, speakers etc.) for wireless communication over a short distance, approximately 15m. Bluetooth operates at a 2.4GHz ISM band. Bluetooth uses low-energy radio waves for data communication between Bluetooth-enabled devices.
Now, let's design the code to communicate over ESP32 Classic BT:
We are using Arduino IDE for code compiling and uploading to the ESP32 module. I hope you have already installed ESP32 Boards in Arduino IDE. So, let's design a simple project to understand the working of ESP32 Bluetooth Classic:
First of all, we will install a "Serial BluetoothTerminal" App from the Google Play Store to communicate with the ESP32 Classic BT.
In this project, we will first enable the ESP32 Classic Bluetooth, so that we can connect it to our smartphone. After a successful connection, we will send data from our smartphone(Serial Bluetooth Terminal App) to the ESP32 Serial Terminal and vice versa.
So, let's first understand the ESP32 BT Code and then will install the Serial Bluetooth App from the Google Play Store:
Here's the complete code:
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to enable it
#endif
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin("TEP_ESP32_BT"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
}
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
Let's understand the code working:
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to enable it
#endif
BluetoothSerial SerialBT;
Initial Configurations of the project are added in the Setup() function. In our code:
void setup() {
Serial.begin(115200);
SerialBT.begin("TEP_ESP32_BT"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
}
The Loop() Function is an infinite loop and is equivalent to while(1) in normal C Language. In our code, we have placed two if checks:
If we send any data from the Serial Terminal, this data will be transmitted to the SerialBT.
If we receive any data via ESP32 Classic Bluetooth, we will print it on the Serial Terminal.
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
So, I hope you have understood the working of this ESP32 Classic Bluetooth code. Now, let's install the Serial Bluetooth Terminal App from the Google Play Store:
If we are connecting with the ESP32 BT for the first time, we need to pair it first.
It will scan the list of all the available Bluetooth devices:
[Image]
We have successfully paired the ESP32 BT with the smartphone's Bluetooth.
ESP32 BT to Smartphone - Data Testing
[Image]
[Image]
So, that's how we can communicate between ESP32 and smartphones over Classic Bluetooth. In today's lecture, we communicated simple text data to understand the working principle. In the upcoming lectures, we will send complex data(i.e. commands & sensor values) via Classic Bluetooth.
Now, let's have a look at some theoretical knowledge about Classic Bluetooth:
Fig: BLE vs Classic Bluetooth
But, a device having BT V4 (Bluetooth version 4) can discover both BLE and Classic Bluetooth devices.
Fig: Classic Bluetooth Network topology
Classic Bluetooth can operate on both point-to-point and point-to-multi-point network topology. In traditional Bluetooth, a maximum of 7 slave devices can be connected with the master Bluetooth at a time. Though, classic Bluetooth can connect with multiple nodes/slave devices at a time, but it can exchange data with only a single node at a time.
In classic Bluetooth, the piconets are not synchronized.
The clock is one of the most important aspects of Bluetooth. In a Bluetooth connection, the master device has a clock that is used to split the time on each physical channel. Clocks on all slaves in a connection are synchronized to the master clock.
Bluetooth clock synchronization is essential because the radios must agree on when to transmit. Because Bluetooth uses precise timeslots for transmissions with devices alternating, if the clocks are not synchronized, there may be issues with devices transmitting at the incorrect time.
It is defined in multiple classes:
Generally, there are two data transmission modes:
Fig. Bluetooth packet format
Enhanced data rate packet sends the Access code and header using the basic rate and this process uses GFSK (Gaussian Frequency Shift Keying). The guard gives the time to change the modulation to EDR modulation and then the synch word (64 bits), payload, and Trailer (4 bits) bits are sent using EDR (enhanced data rate) modulation.
So, that was all for today. In the next lecture, we will communicate between ESP32 and smartphones via BLE(Bluetooth Low Energy). Till then take care. Have a good day!!!
{kind=link}
{kind=link}
{kind=link}