






 Getting Started Guide
Getting Started Guide
 Help Center
Help Center
 Contact us
Contact us
 Doist Blog
Doist Blog
 Privacy
Privacy
 Security
Security
 Terms of Service
Terms of Service
 What's new: Channel Descriptions
What's new: Channel Descriptions
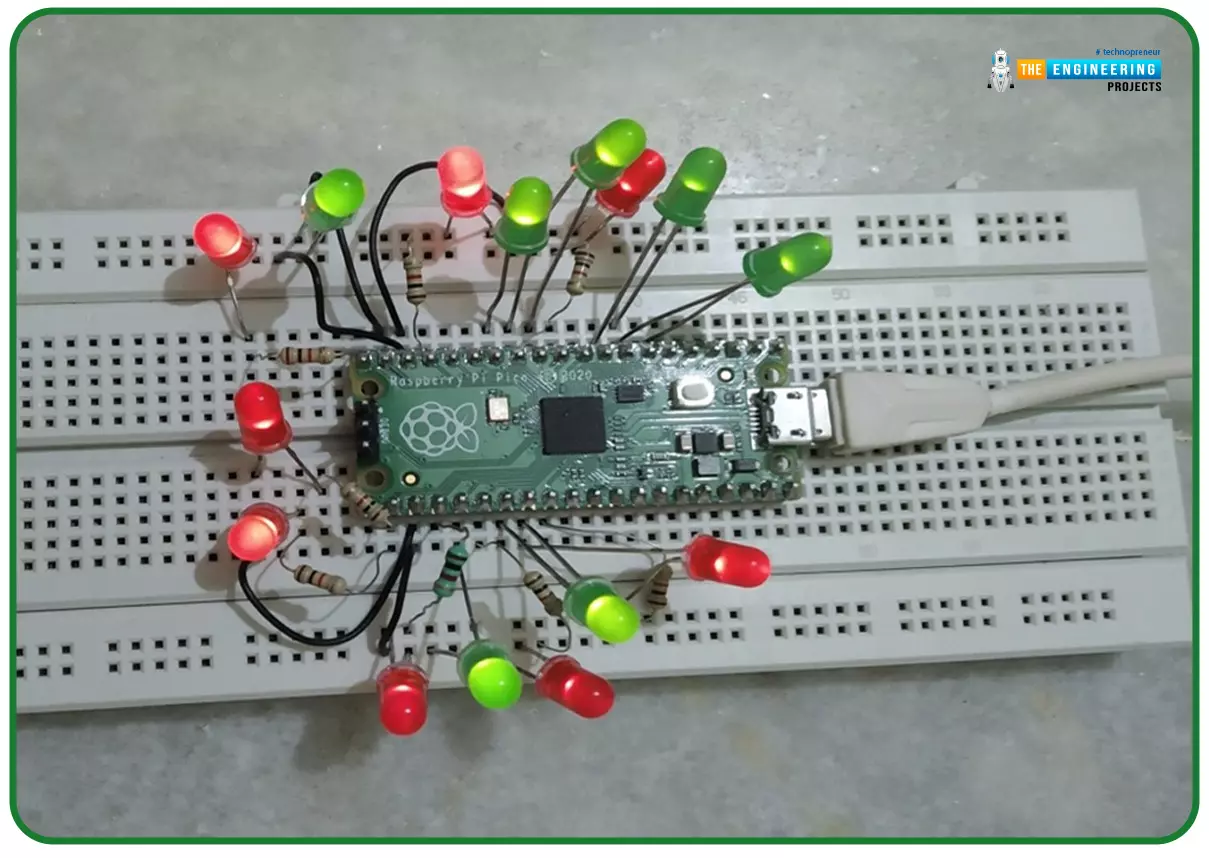
Implementing PWM with Raspberry Pi Pico using MicroPython


 1 user
Limited Projects
Email Support
3 user
Unlimited Projects
Social Support
25 user
Unlimited Projects
Multi-Product Support
1 user
Limited Projects
Email Support
3 user
Unlimited Projects
Social Support
25 user
Unlimited Projects
Multi-Product Support








 2
2
 2
2



















 20K
20K 900
900 900
900 20K
20K 20K
900
900
20K
20K
900
900
20K 20K
900
900
20K
20K
900
900
20K 20K
900
900
20K
20K
900
900
20K 20K
900
900
20K
20K
900
900
20K