So, in today's post, we are gonna have a look at How to create a GUI in MATLAB so that we could also give a user friendly front end to our algorithms. MATLAB GUI has an extensive database with a lot of functionalities, which I can't cover in one post but atleast today, I will make you able to create a simple GUI and will also explain How to control buttons and edit/text boxes etc. After performing this tutorial, you will be able to try GUI on your own.
So, today we will create a simple project in which we will create a simple GUI as shown in below image. The functionality of this GUI will be that when you click on this START button then the text,you have written in the white edit box will appear at the text box above, as shown in figure below. Let's get started with the implementation of this GUI. Follow the steps carefully and ask in comments if you got into any trouble.
You may also like to read:
You can download this GUI by clicking on the below button, but first read the tutorial completely aand try to pratice it by yourself,don''t just download the run the applicationas it won't give you any help.
Download Simple GUI Project in MATLAB
x = get(handles.edit1,'String'); %edit1 being Tag of ur edit box if isempty(x) fprintf('Error: Enter Text firstn'); else set(handles.text2,'String',x) end
Serial port is most common way of communication, we can send or receive data using serial port. Normally, in engineering projects there's a need to send or receive data from microcontrollers to computer and in such projects, we used serial communication as its easy and quite quick in communication.
tep=serial('COM1', 'BaudRate', 9600); fopen(tep); fprintf(tep,'a'); fclose(tep);
- Code 1:
clc clear all close all disp(' Welcome to TEP!!!'); disp(' '); disp(' www.TheEngineeringProjects.com'); disp(' '); tep=serial('COM1'); % assign serial port object set(tep, 'BaudRate', 9600); % set BaudRate to 9600 set(tep, 'Parity', 'none'); % set Parity Bit to None set(tep, 'DataBits', 8); % set DataBits to 8 set(tep, 'StopBit', 1); % set StopBit to 1 %display the properties of serial port object in MATLAB Window disp(get(tep,{'Type','Name','Port','BaudRate','Parity','DataBits','StopBits'})); fopen(tep); % Open Serial Port Object fprintf(tep,'a'); %Print character 'a' to the serial port disp('Charater sent to Serial Port is "a".'); fclose(tep); %Close Serial Port Object
- Code 2:
clc clear all close all disp(' Welcome to TEP!!!'); disp(' '); disp(' www.TheEngineeringProjects.com'); disp(' '); tep=serial('COM1'); % assign serial port object set(tep, 'BaudRate', 9600); % set BaudRate to 9600 set(tep, 'Parity', 'none'); % set Parity Bit to None set(tep, 'DataBits', 8); % set DataBits to 8 set(tep, 'StopBit', 1); % set StopBit to 1 %display the properties of serial port object in MATLAB Window disp(get(tep,{'Type','Name','Port','BaudRate','Parity','DataBits','StopBits'})); fopen(tep); % Open Serial Port Object data = input('Enter character: ', 's'); %Ask user to Enter character fprintf(tep,data); %Print character 'a' to the serial port disp('Charater sent to Serial Port is:'); disp(data); fclose(tep); %Close Serial Port Object
- Code 3:
In today's post we are gonna implement few complex logical gates. Its not gonna be much difficult if you have the basic concepts. I am just pointing out few important points here. While implementing any gate in ladder logic, always consider rung as an electrical line having HIGH voltage at one end and LOW voltage at the other, while the inputs are simple switches. Voltage will be supplied to the output only when switch is closed i.e. input is HIGH, otherwise the output will remain OFF. You should also have a look at Introduction to Logic Gates.
You have seen in previous post, while implementing OR gate we have used a second switch in parallel which ends at the first rung so overall its a single rung having two inputs in parallel so input can come either from first switch or from second one. So, now let's start implementing some complex logical gates in Ladder Logic for PLC. Today, we are gonna implement these logic gates:
Ladder Logic is different from the usual programming language of Microcontrollers like Arduino, PIC Microcontroller etc. Microcontrollers programming usually compiled from top to bottom i.e. the compiler first capture the first statement and then moves downward till it reaches the end line but that's not the case with Ladder Logic Programming for PLC. In ladder logic, the compiler moves from left to right and it gets all the lines at the same time. It seems bit difficult to understand at first but be with me and you will get it at the end. :)
Ladder Logic is a programming language used for PLC as C for Microcontrollers. Ladder logic is a combination of rungs. Each rung is executed from left to right. For example, have a look at the below figure, a single rung of ladder logic is shown in it.
Today. I am gonna give an overview about PLC. We will have a look on basics i.e. what is PLC? Why we use PLC instead of microcontroller like Arduino or PIC Microcontroller? What's its advantages and disadvantages? I will try to cover all about the basics. After reading this tutorial, you must have a look at Introduction to Ladder Logic for P L C, Ladder Logic is programming language for PLCs.
There are different types of PLCs available in the market manufactured by different companies, so its impossible to cover all of them. In this tutorial, I am gonna discuss Fatek PLC as I have worked on it during my project. The model I have used is Fatek PLC Fbs-20MA. The reason I used this model because it was cheap and has enough input/output ports sufficient for my project. That's why I preferred it as its engineers' task to optimize the cost as well. Let's get started with PLC.
Its a basic question, which is normally asked by all the starters so I am gonna reply it first for the newbies.
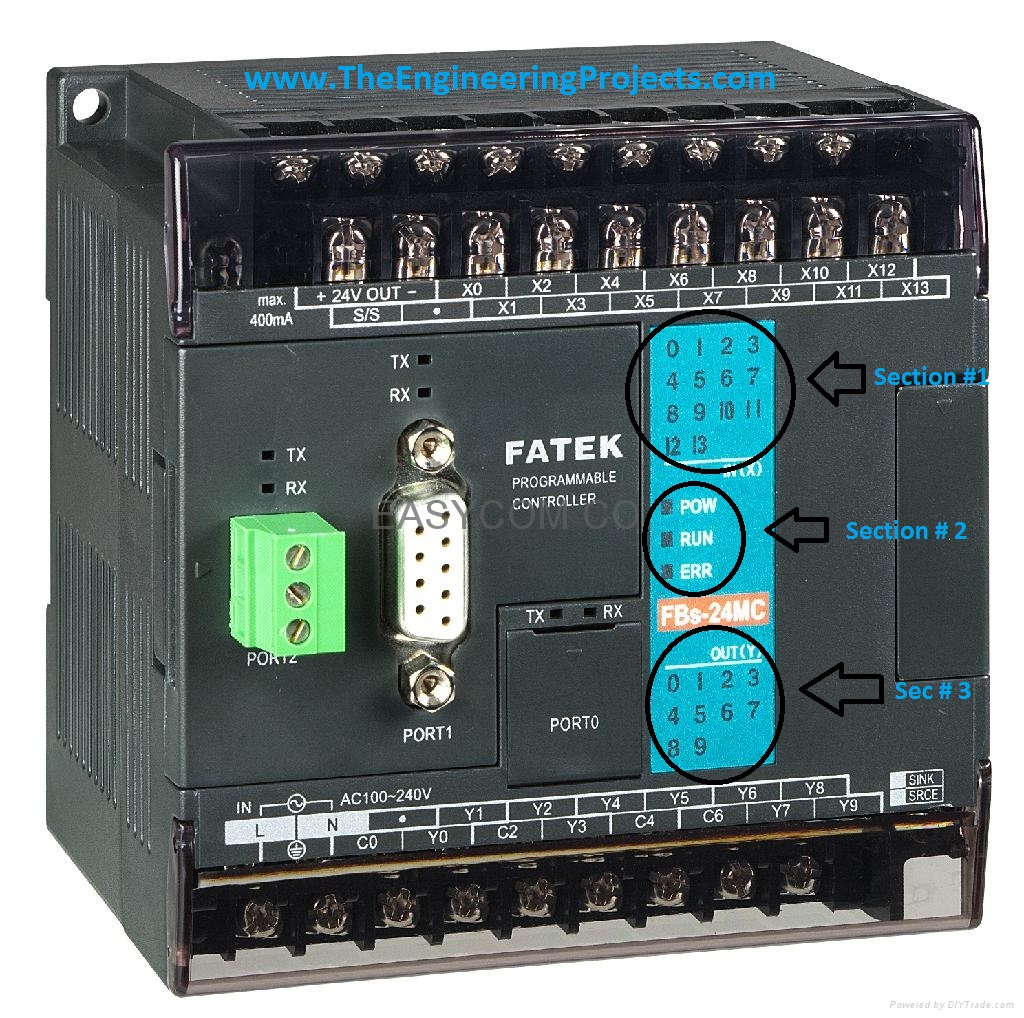
What's inside PLC, which makes it so cool ? That's a good question and normally engineers wonder about it. PLC can be divided into 3 sections, which are as follows:
I think now you have the idea about PLC, so now I am getting started with PLC. I am gonna explain the functioning of Fatek PLC as I have used that one but if you are using another model of PC then no need to panic as all PLCs have same functionality. So, it doesn't matter which one you are using. If you check the below image then you will see I have marked three sections in it.
In the below image, I have indicated Section 4 and 5, these are the input/ output section. If you have a look at it closely then you can see there are two rows of screws, where you plug your wires for inputs and outputs and above them, they are also labelled with white color. So, it goes like that, first row of labelling is for first row of screws and second row is for second row of screws.
That's all for today. I hope you got the basic idea of Programmable logic controller and now its time to have a look at Introduction to Ladder Logic for P L C, ladder logic is programming language for PLC. Your feedback are warmly welcome. In the next tutorial, I am gonna cover about ladder logic and will show you how to program a PLC. Till then Take care and have fun.
This post is the next part of our previous post Financial Calculations in MATLAB named as Implementation of Black Litterman Approach in MATLAB, so if you haven't read that then you can't understand what's going on here so, its better that you should first have a look at that post. Moreover, as this code is designed after a lot of our team effort so its not free but we have placed a very small cost of $20. So you can buy it easily by clicking on the above button.In the previous post, we have covered five steps in which we first get the financial stock data, then converted it to common currency and after that we calculated the expected returns and covariance matrix and then plot the frontiers with and without risk free rate of 3%. Now in this post, we are gonna calculate the optimal asset allocation, average return after the back test, calculation of alphas and betas of the system and finally the implementation of black-litterman approach. First five steps are explained in the previous tutorial and the next four steps for Implementation of Black Litterman Approach in MATLAB are gonna discuss in this tutorial, which are as follows:
You may also like to read:
In this part of the problem,I calculated the optimal asset allocation in the different years by choosing a constant required return. I chose the constant required return equal to 0.01 and used the highest_slope_portfolio function and plot the graphs. The code used in MATLAB is shown in the below:
ConsRet=0.010 for w=1:10 [xoptCR(:,w), muoptCR(w), sigoptCR(w)] = highest_slope_portfolio( covmat{1,w}, ConsRet , estReturn(w,:)', stdRet(w,:) ); End
The result for this part is shown in the Figure 3. For a constant required return of 0.01, portfolio turnover for each year has increased approximately by 2%.
In this part of the assignment, it was asked to perform a back test for the optimized portfolios and calculate the average return and the standard deviation for this portfolio. Average return is the average of expected return for the corresponding year and it is calculated by the below code in MATLAB, where w is varying from 1 to 10 to calculate for all the 10 years.
BTreturn(w,:)=estReturn(w,:)*xoptCR(:,w);Results obtained after the back test for the optimized portfolios for average return are shown in table3 below:
| Average Return after the back test | |
| 1st year | 0.1158 |
| 2nd year | 0.0889 |
| 3rd year | 0.0797 |
| 4th year | 0.0628 |
| 5th year | -0.0660 |
| 6th year | -0.4323 |
| 7th year | -5.1212 |
| 8th year | -0.6820 |
| 9th year | 0.2891 |
| 10th year | 0.1691 |
Table : Average return after the back test
The standard deviation of the rate of return is a measure of risk. It is defined as the square root of the variance, which in turn is the expected value of the squared deviations from the expected return. The higher the volatility in outcomes, the higher will be the average value of these squared deviations. Therefore, variance and standard deviation measure the uncertainty of outcomes. Symbolically,
BTstd(w,:)=sqrt(stdRet(w,:).^2*(xoptCR(:,w).^2));The results of standard deviation for the 10 years are as follows:
| Standard Deviation after the back test | |
| 1st year | 0.2942 |
| 2nd year | 0.1833 |
| 3rd year | 0.1799 |
| 4th year | 0.1733 |
| 5th year | 0.4026 |
| 6th year | 1.5834 |
| 7th year | 16.1279 |
| 8th year | 2.1722 |
| 9th year | 1.0430 |
| 10th year | 0.4949 |
FTLC= hist_stock_data('01111993','01112013','^FTLC','frequency','m'); LRFTLC=diff(log(FTLC.Close));After that I calculated the expected return of one unit of each asset based on the model which gave me the total covariance matrix for the single and multi indexed model. Finally, I calculated the alpha and beta for the model. The MATLAB code used for performing these actions is shown below:
for i = 1:7 mdl_si{i} = LinearModel.fit(LRFTLC, logRet(:,i), 'linear'); mdl_ret_s(i) = mdl_si{i}.Coefficients.Estimate(1:2)' * [1; 12*mean(LRFTLC)]; mdl_cov_s(i) = mdl_si{i}.RMSE^2; alpha_s = [mdl_si{i}.Coefficients.Estimate(1), alpha_s]; beta_s = [mdl_si{i}.Coefficients.Estimate(2), beta_s]; endAs a result, alphas and betas of the system are obtained which are shown in the table below:
| Aplha | Beta |
| 0.0068 | 0.1748 |
| 0.0057 | 0.0335 |
| 0.0050 | 0.0528 |
| 0.0063 | 0.0552 |
| 0.0030 | 0.0249 |
| 0.0035 | 0.0083 |
| 0.0047 | 0.0289 |
Table: Alpha & beta of the model
In this part, I have finally implemented the Black Litterman approach on the data available. Black Litterman approach involves the below steps:
Few MATLAB Projects:
gamma = 1.9; tau = .3; for w=1:10 ind=[(w-1)*12+1 (w+10)*12]; logRet2=logRet(ind(1):ind(2),:); for i=1:7 OplogRet(:,i)=logRet2(i,:).*xoptCR(i,w)'*100; end covmatOP{1,w}=12*cov(OplogRet); end for w=1:10 Opweig(:,w)=xoptCR(:,w); Pi{w}= gamma *covmatOP{1,w}* Opweig(:,w); end figure for w=1:10 title('BL'); hold on; bar(Pi{w}) hold on; endThat's all for today, hope it will help you all in some way. If you have any questions then ask in comments and I will try my best to resolve them.
After that I calculated Expected Returns & Covariance Matrix for all these data for the last 10 years and finally plot them. Moreover, I have also plotted the frontiers with risk free rate of 3% so that the ideal and realistic conditions can be compared. So, here are the overall steps we are gonna cover in this project:
You may also like to read:
Stocks = hist_stock_data('X', 'Y', 'Z', 'frequency', 'm')
snp500 = hist_stock_data('01111993','01112013','^GSPC','frequency','m'); NDX=hist_stock_data('01111993','01112013','^NDX','frequency','m'); GSPTSE=hist_stock_data('01111993','01112013','^GSPTSE','frequency','m'); DAX = hist_stock_data('01111993','01112013','^GDAXI','frequency','m'); CAC40=hist_stock_data('01111993','01112013','^FCHI','frequency','m'); FTAS=hist_stock_data('01111993','01112013','^FTAS','frequency','m'); SSMI=hist_stock_data('01111993','01112013','^SSMI','frequency','m');
The first two values were in US dollars, while third one was in CAD dollars, fourth and fifth values were in Euros, sixth were in GBP and the last one was in Swiss France. Hence, there was a need to convert all these currencies into one currency as instructed. I converted all of them into US dollars. In order to convert them, I first defined the exchange rate between these currencies and the US dollars using the below code:
GBP2USD=1.6; EURO2USD=1.34; CAD2USD=0.95; SF2USD=1.08;After defining the exchange rate, I applied it to all the currencies using the below code:
GSPTSE=CurrencyConvert(GSPTSE, CAD2USD); DAX=CurrencyConvert(DAX, EURO2USD); CAC40=CurrencyConvert(CAC40, EURO2USD); FTAS=CurrencyConvert(FTAS, GBP2USD); SSMI=CurrencyConvert(SSMI, SF2USD);Now all the currencies for the financial stock indices for 7 sectors are obtained in US dollars.
In this part, we calculated the expected returns and covariance matrix in annual steps for a period of 10 years. I used the data for 7 markets or sectors were obtained in the first step and calculated their expected returns and covariance matrix. The expected rate of return is a probability-weighted average of the rates of return in each scenario. We may write the expected return as:
Where,First of all, I initialized a column matrix and filled it with the above data and took log of each data separately by using MATLAB commands as follows:
covmat=cell(1,11); ret=flipud([log(SSMI.Close) log(FTAS.Close) log(CAC40.Close) log(DAX.Close) log(GSPTSE.Close) log(snp500.Close) log(NDX.Close)]);
Further, I calculated the differences between adjacent elements of each data using the diff command in MATLAB.
logRet=[diff(ret(:,1)) diff(ret(:,2)) diff(ret(:,3)) diff(ret(:,4)) diff(ret(:,5)) diff(ret(:,6)) diff(ret(:,7))];
Expected return is nothing other than a guaranteed rate of return. However, it can be used to forecast the future value of a market, and it also provides a guide from which to measure actual returns. Hence to calculate the expected return, I first take two indices with w as a variable where w = 1:10 and calculated these indices for all the values of w and finally took mean value of each data with these two indices as follows:
ind=[(w-1)*12+1 (w+10)*12]; estReturn(w,:)=[mean(logRet(ind(1):ind(2),1)) mean(logRet(ind(1):ind(2),2)) mean(logRet(ind(1):ind(2),3)) mean(logRet(ind(1):ind(2),4)) mean(logRet(ind(1):ind(2),5)) mean(logRet(ind(1):ind(2),6)) mean(logRet(ind(1):ind(2),7))];
The above values calculated for all the 10 times and hence it is placed within a for loop. estReturn gives us the estimated return for a single month and now there’s a need to convert it to annual return, which is accomplished by below command, simply by mutilpying it with 12.
estReturn(w,:)=estReturn(w,:)*12;
After the calculation of expected return annually, I used the command var(X) to calculate the variance of the data. Although it was not asked to calculate in the problem but in order to calculate the covariance, it is required to first obtain the data such that each row of the matrix becomes an observation and each column is a variable. The command used for the calculation of variance is as shown below:
stdRet(w,:)=sqrt(12*var([ logRet(ind(1):ind(2),1) logRet(ind(1):ind(2),2) logRet(ind(1):ind(2),3) logRet(ind(1):ind(2),4) logRet(ind(1):ind(2),5) logRet(ind(1):ind(2),6) logRet(ind(1):ind(2),7)]));
Finally, I used the MATLAB command cov(x) to calculate the covariance of the data. The syntax used is:
Y = cov(X)Where,
| Expected Return | SSMI | FTAS | CAC40 | DAX | GSPTSE | SNP50 | NDX |
| 1st year | 0.0625 | 0.0373 | 0.0524 | 0.0632 | 0.0700 | 0.0848 | 0.0644 |
| 2nd year | 0.0954 | 0.0531 | 0.0762 | 0.0846 | 0.0884 | 0.0921 | 0.1290 |
| 3rd year | 0.0872 | 0.0506 | 0.0972 | 0.0940 | 0.0915 | 0.0763 | 0.1004 |
| 4th year | 0.0742 | 0.0457 | 0.0814 | 0.0925 | 0.0747 | 0.0610 | 0.0835 |
| 5th year | 0.0006 | -0.0064 | 0.0122 | 0.0147 | 0.0321 | -0.0058 | 0.0110 |
| 6th year | -0.0112 | 0.0007 | -0.0039 | 0.0103 | 0.0537 | -0.0055 | 0.0115 |
| 7th year | -0.0144 | -0.0069 | -0.0356 | 0.0115 | 0.0494 | -0.0148 | -0.0307 |
| 8th year | -0.0314 | -0.0034 | -0.0573 | -0.0041 | 0.0295 | -0.0048 | -0.0080 |
| 9th year | 0.0081 | 0.0180 | -0.0209 | 0.0359 | 0.0454 | 0.0198 | 0.0470 |
| 10th year | 0.0431 | 0.0529 | 0.0228 | 0.0907 | 0.0644 | 0.0575 | 0.1007 |
Table 1: Expected Returns for 10 years
| Covariance Matrix for 1st year | ||||||
| SSMI | FTAS | CAC40 | DAX | GSPTSE | SNP50 | NDX |
| 0.0334 | 0.0191 | 0.0285 | 0.0324 | 0.0168 | 0.0190 | 0.0196 |
| 0.0191 | 0.0201 | 0.0234 | 0.0271 | 0.0155 | 0.0169 | 0.0257 |
| 0.0285 | 0.0234 | 0.0434 | 0.0444 | 0.0211 | 0.0226 | 0.0380 |
| 0.0324 | 0.0271 | 0.0444 | 0.0609 | 0.0252 | 0.0280 | 0.0527 |
| 0.0168 | 0.0155 | 0.0211 | 0.0252 | 0.0268 | 0.0198 | 0.0342 |
| 0.0190 | 0.0169 | 0.0226 | 0.0280 | 0.0198 | 0.0234 | 0.0379 |
| 0.0196 | 0.0257 | 0.0380 | 0.0527 | 0.0342 | 0.0379 | 0.1411 |
| Covariance Matrix for 2nd year | ||||||
| SSMI | FTAS | CAC40 | DAX | GSPTSE | SNP50 | NDX |
| 0.0318 | 0.0179 | 0.0273 | 0.0322 | 0.0162 | 0.0185 | 0.0235 |
| 0.0179 | 0.0180 | 0.0213 | 0.0258 | 0.0151 | 0.0161 | 0.0269 |
| 0.0273 | 0.0213 | 0.0404 | 0.0427 | 0.0209 | 0.0219 | 0.0390 |
| 0.0322 | 0.0258 | 0.0427 | 0.0590 | 0.0255 | 0.0279 | 0.0503 |
| 0.0162 | 0.0151 | 0.0209 | 0.0255 | 0.0265 | 0.0193 | 0.0367 |
| 0.0185 | 0.0161 | 0.0219 | 0.0279 | 0.0193 | 0.0230 | 0.0394 |
| 0.0235 | 0.0269 | 0.0390 | 0.0503 | 0.0367 | 0.0394 | 0.1014 |
| Covariance Matrix for 3rd year | ||||||
| SSMI | FTAS | CAC40 | DAX | GSPTSE | SNP50 | NDX |
| 0.0314 | 0.0181 | 0.0280 | 0.0320 | 0.0164 | 0.0186 | 0.0237 |
| 0.0181 | 0.0181 | 0.0214 | 0.0261 | 0.0152 | 0.0160 | 0.0270 |
| 0.0280 | 0.0214 | 0.0397 | 0.0433 | 0.0212 | 0.0224 | 0.0399 |
| 0.0320 | 0.0261 | 0.0433 | 0.0579 | 0.0259 | 0.0282 | 0.0509 |
| 0.0164 | 0.0152 | 0.0212 | 0.0259 | 0.0266 | 0.0194 | 0.0371 |
| 0.0186 | 0.0160 | 0.0224 | 0.0282 | 0.0194 | 0.0227 | 0.0395 |
| 0.0237 | 0.0270 | 0.0399 | 0.0509 | 0.0371 | 0.0395 | 0.1014 |
In this part, it was asked to plot the 11 different frontiers in one figure. The concept of efficient frontier was introduced by Harry Markowitz and it is defined as if a portfolio or a combination of assets has the best expected rate of return for the level of risk, it is facing, then it will be referred as “efficient”.
Few more MATLAB Projects:
In order plot them, I used the below code in MATLAB, I used different markers for different plots so that they could be distinguished from one another quite easily. Moreover, I used the command legend in order to show the respective years for which the graphs are plotted. RF is a variable which indicate the risk-free rate and as it is asked to operate under efficient frontier that’s why risk-free rate is equal to zero.
RF=0; for w=1:10 [xopt(:,w), muopt(w), sigopt(w)] = highest_slope_portfolio( covmat{1,w}, RF, estReturn(w,:)', stdRet(w,:) ); end mker=['o' '+' '*' '.' 'x' 's' 'd' '^' '>' '<'] figure for w=1:10 plot (sigopt(w), muopt(w) ,'Marker', mker(w)); hold on; plot (0, RF, 'o'); hold on; RF_p1 = [0 sigopt(w) 2* sigopt(w)]; opt1_p = [.02 muopt(w) (2 * muopt(w) - RF) ]; line(RF_p1, opt1_p ); end legend('Year 1994', 'Year 1995', 'Year 1996', 'Year 1997','Year 1998','Year 1999','Year 2000', 'Year 2001', 'Year 2002', 'Year 2003')In this code, first of all I used highest_slope_portfolio function. This function finds the portfolio with the highest slope. Results are shown in the below figure annually:
The plot in Part (c) was about the efficient frontier with risk rate equal to zero i.e. operating in an ideal condition while in this part, it was asked to plot the same graphs but this time include a risk-free rate of 3%. Hence I used the same code as for the previous part but only this time I used RF = 0.03 as I needed to include a risk free rate of 3%. The code used in MATLAB for this part is shown below:
RF=0.03; %the risk free rate for w=1:10 [xoptRF{w}, muoptRF(w), sigoptRF(w)] = highest_slope_portfolio( covmat{1,w}, RF, estReturn(w,:)', stdRet(w,:) ); end figure for w=1:10 plot (sigoptRF(w), muoptRF(w) ,'Marker', mker(w)); hold on; plot (0, RF, 'o'); hold on; RF_p1 = [0 sigoptRF(w) 2* sigoptRF(w)]; opt1_p = [.02 muoptRF(w) (2 * muoptRF(w) - RF) ]; line(RF_p1, opt1_p ); end legend('Year 1994', 'Year 1995', 'Year 1996', 'Year 1997','Year 1998','Year 1999','Year 2000', 'Year 2001', 'Year 2002', 'Year 2003')
The result for this part i.e. after including a risk-free rate of 3% is shown in the figure below. If the Figure 1 and Figure 2 are closely examined then one can see the clear difference. When the risk-free rate was considered zero, all the expected estimate graphs were in positive direction depicting the profit annually while after adding a risk-free rate of 3%, few of the graphs went in the negative direction depicting the loss in those years. Hence adding the risk factor may cause the business to get deceased and it may even cause it to decline continuously which results in disaster.
That's all for today, in the coming post, I will calculate more financial terms like Optimal asset allocation, average return, standard deviation and much more, so stay tuned and have fun.
Hello friends, today I am going to post a complete project designed on MATLAB named as Modelling of DVB-T2 system using Consistent Channel Frequency in MATLAB. This project is designed by our team and it involved a lot of effort to bring it into existence that's why its not free but as usual I have discussed all the details below related to it, which will help you understanding it and if you want to buy it then you can click on the Buy button shown above.
This project aims to implement a DVB-T2 (Digital Video Broadcasting for terrestrial television) system using consistent channel frequency responses. Tthe code is designed to use the same output from a channel model for different transmitter configurations so that consistency of performance results can be obtained. After that the overall project will be modified to repeat an experiment “n” times collecting data so that “x%” confidence intervals can be calculated. Historically, DVB is a project worked by more than 250 companies around Europe at first and now worldwide. DVB-T2 is the world’s most advanced digital terrestrial television (DTT) system, offering more robustness, flexibility and at least 50% more efficiency than any other DTT system. It supports SD, HD, mobile TV, or any combination thereof. The GUI for DVB-T2 parameters selection in MATLAB is shown on the left.
DVB-T2 is the second generation standard technology used for digital terrestrial TV broadcasting. As it’s a new technology so it has many fields to explore and research, and the best way of researching on any new technology is via simulations. Simulations provide an easy and efficient way to evaluate the performance of any system. For simulation purposes, MATLAB software was chosen in this thesis because of its wide range of tools and ability to show graphical results in a very appropriate form. . Further, this DVB-T2 simulation model could be extended easily to simulate DVB-H, which shares many features with DVB-T2 (only the physical layer that needs modification). The most important feature, I discussed in my simulations are:
DVB-T2 scheme can handle wide range of sub carriers from a range of 1k to 32k; these sub carriers can be fixed or mobile. In this thesis, experiments are performed on mobile transmission of signals to 4000 sub carriers. Below are discussed three different mobile scenarios, for different speeds of mobiles user, which are:
In all the scenarios, the factors mentioned below are kept constant so that a real comparison can be obtained and it could be checked that whether the speed affects the signal or not. These constant factors are:
During this thesis, help was taken from a MATLAB model of DVB-T2 transmission system designed by a student at Brunel University. First this initial model was studied and then enhanced it to a higher level. The first model designed by the student at Brunel University, performed the iterations on the DVB-T2 system and gives the results for just one cycle. Explanation of this initial model is discussed in detail below.
After the user input all the values in the GUI, this model first calculates the below three values depending on the number of subcarriers attached to the DVB-T2 system.
After getting this information, the model performs the QAM modulation over the signal so that it could be sent from the transmitter to the receiver. Next, depending on the value of Pilot Pattern given by the user, it calculates the scattered Pilot Amplitudes for the system. After that, it calculates the distortion in transmission depending on area in which the signal is propagating.
In order to calculate the distortion, FFT technique is performed on the signals to get their frequency response. As the signal has already sent from the transmitter after QAM modulation so demodulation on the receiver side is necessary. The model performs the same and demodulates the signal and finally it calculates the value of Signal to noise ratio (SNR) and Bit Error Rate (BER). At the end, it simply plots the graphs of SNR and BER for the visual representation.
Different experiments were performed on the initial model and checked its results. The results are given below for three different experiments, which are:
Results of these experiments are shown in figure 6.1, 6.2 and 6.3 respectively. Table 6.1, 6.2 and 6.3 gives the values of BER and average BER for all the values of SNR. If these three graphs are closely examined then it can be shown that the band limited impulse response increases as the speed increase and so as the BER and SNR.
The reason for such behavior is that because as the speed of the mobile increase, signal distortion also increases and it becomes difficult for the receiver to catch the signal, that’s the main reason that user travelling in high speed vehicle faces more distortion as compared to a pedestrian.
| SNR | BER & Average BER |
| SNR: 0 | BER:0.103833 |
| SNR: 0 | NoAvrg_BER:0.160358 |
| SNR: 5 | BER:0.014366 |
| SNR: 5 | NoAvrg_BER:0.033706 |
| SNR: 10 | BER:0.000206 |
| SNR: 10 | NoAvrg_BER:0.001528 |
| SNR: 15 | BER:0.000002 |
| SNR: 15 | NoAvrg_BER:0.000107 |
| SNR: 20 | BER:0.001543 |
| SNR: 20 | NoAvrg_BER:0.002319 |
| SNR: 25 | BER:0.000076 |
| SNR: 25 | NoAvrg_BER:0.000184 |
| SNR: 30 | BER:0.000000 |
| SNR: 30 | NoAvrg_BER:0.000164 |
BER & Average BER Vs. SNR for experiment 1
| SNR | BER & Average BER |
| SNR: 0 | BER:0.140855 |
| SNR: 0 | NoAvrg_BER:0.195596 |
| SNR:5 | BER:0.046527 |
| SNR:5 | NoAvrg_BER:0.071364 |
| SNR:10 | BER:0.011363 |
| SNR:10 | NoAvrg_BER:0.019860 |
| SNR:15 | BER:0.003815 |
| SNR:15 | NoAvrg_BER:0.006448 |
| SNR:20 | BER:0.000604 |
| SNR:20 | NoAvrg_BER:0.001222 |
| SNR:25 | BER:0.000214 |
| SNR:25 | NoAvrg_BER:0.000404 |
| SNR:30 | BER:0.000233 |
| SNR:30 | NoAvrg_BER:0.000503 |
| SNR | BER & Average BER |
| SNR: 0 | BER:0.128177 |
| SNR: 0 | NoAvrg_BER:0.182924 |
| SNR:5 | BER:0.056198 |
| SNR:5 | NoAvrg_BER:0.084254 |
| SNR:10 | BER:0.023229 |
| SNR:10 | NoAvrg_BER:0.035131 |
| SNR:15 | BER:0.006793 |
| SNR:15 | NoAvrg_BER:0.010362 |
| SNR:20 | BER:0.001748 |
| SNR:20 | NoAvrg_BER:0.002801 |
| SNR:25 | BER:0.000425 |
| SNR:25 | NoAvrg_BER:0.000691 |
| SNR:30 | BER:0.000354 |
| SNR:30 | NoAvrg_BER:0.000515 |
BER & Average BER vs. SNR for experiment 3
Although the results given by these simulations were quite accurate but they were not accurate enough to be trusted, as they were performing the process just for one period and getting the results on the basis of that.
The initial MATLAB model is modified in this thesis, in order to use the same output from the channel model with different transmitter configurations to obtain more consistent results that can be compared with each other. Then theDVB-T2model will be modified so that it can be simulated using Matlab n times collecting data so that an x% confidence interval can be measured.
The results obtained after modifications were very consistent as they were performing the whole scenario for N times (defined by the user), this attribute lacks in the initial model as it was performing the complete task just for one cycle of time and any kind of distortion could fluctuate the results. While in modified model, the same process was performed by N times defined by the user and the results obtained are actually the average of all the cycles and hence providing a very consistent output, which couldn’t be distorted by any external factors.
Moreover, this new model further enhanced the initial model to calculate the Mean BER as it will give the overall performance of BER and average BER. Furthermore, calculates the standard BER on the basis of which global BER is also calculated.As the simulation of DVB-T2 requires a lot of input parameters from the user, that’s why a GUI is also designed in MATLAB, which makes the working of this project user friendly. User can easily change the parameters of the system using that GUI. On startup, the GUI looks like as shown in figure 4.2:
As mentioned above, taking all the other parameters constant, three experiments are performed for the mobile user moving at different speeds with different Iterations and no. of repeats, which are:
Results of the first experiment are shown in the figure 6.5, 6.6 and 6.7 respectively. While the theoretical values of BER and average BER for the corresponding SNR are shown in table 6.4 and the Mean BER and std BER are shown in table 6.5.
| For N=1 | For N=2 | ||
| SNR: 0 | BER:0.131272 | SNR: 0 | BER:0.131542 |
| SNR: 0 | NoAvrg_BER:0.185916 | SNR: 0 | NoAvrg_BER:0.186218 |
| SNR:1 | BER:0.107086 | SNR:1 | BER:0.106672 |
| SNR:1 | NoAvrg_BER:0.157698 | SNR:1 | NoAvrg_BER:0.157319 |
| SNR:2 | BER:0.086805 | SNR:2 | BER:0.086459 |
| SNR:2 | NoAvrg_BER:0.129841 | SNR:2 | NoAvrg_BER:0.129562 |
| SNR:3 | BER:0.087178 | SNR:3 | BER:0.086924 |
| SNR:3 | NoAvrg_BER:0.128066 | SNR:3 | NoAvrg_BER:0.127755 |
| SNR:4 | BER:0.081465 | SNR:4 | BER:0.081709 |
| SNR:4 | NoAvrg_BER:0.116619 | SNR:4 | NoAvrg_BER:0.116581 |
| SNR:5 | BER:0.028071 | SNR:5 | BER:0.028074 |
| SNR:5 | NoAvrg_BER:0.051596 | SNR:5 | NoAvrg_BER:0.051751 |
| SNR:6 | BER:0.016450 | SNR:6 | BER:0.016439 |
| SNR:6 | NoAvrg_BER:0.030762 | SNR:6 | NoAvrg_BER:0.030725 |
| SNR:7 | BER:0.012705 | SNR:7 | BER:0.012607 |
| SNR:7 | NoAvrg_BER:0.022399 | SNR:7 | NoAvrg_BER:0.022108 |
| SNR:8 | BER:0.036446 | SNR:8 | BER:0.036612 |
| SNR:8 | NoAvrg_BER:0.052421 | SNR:8 | NoAvrg_BER:0.052642 |
| SNR:9 | BER:0.026200 | SNR:9 | BER:0.026378 |
| SNR:9 | NoAvrg_BER:0.039987 | SNR:9 | NoAvrg_BER:0.040434 |
| SNR:10 | BER:0.014162 | SNR:10 | BER:0.014155 |
| SNR:10 | NoAvrg_BER:0.023779 | SNR:10 | NoAvrg_BER:0.023805 |
| SNR:11 | BER:0.007526 | SNR:11 | BER:0.007539 |
| SNR:11 | NoAvrg_BER:0.013874 | SNR:11 | NoAvrg_BER:0.013838 |
| SNR:12 | BER:0.015524 | SNR:12 | BER:0.015382 |
| SNR:12 | NoAvrg_BER:0.023693 | SNR:12 | NoAvrg_BER:0.023602 |
| SNR:13 | BER:0.005303 | SNR:13 | BER:0.005448 |
| SNR:13 | NoAvrg_BER:0.008758 | SNR:13 | NoAvrg_BER:0.008764 |
| SNR:14 | BER:0.008712 | SNR:14 | BER:0.008823 |
| SNR:14 | NoAvrg_BER:0.014517 | SNR:14 | NoAvrg_BER:0.014421 |
| SNR:15 | BER:0.013224 | SNR:15 | BER:0.013144 |
| SNR:15 | NoAvrg_BER:0.019547 | SNR:15 | NoAvrg_BER:0.019305 |
| SNR:16 | BER:0.001919 | SNR:16 | BER:0.001890 |
| SNR:16 | NoAvrg_BER:0.003767 | SNR:16 | NoAvrg_BER:0.003703 |
| SNR:17 | BER:0.002873 | SNR:17 | BER:0.002907 |
| SNR:17 | NoAvrg_BER:0.004932 | SNR:17 | NoAvrg_BER:0.005001 |
| SNR:18 | BER:0.000610 | SNR:18 | BER:0.000641 |
| SNR:18 | NoAvrg_BER:0.001197 | SNR:18 | NoAvrg_BER:0.001243 |
| SNR:19 | BER:0.006294 | SNR:19 | BER:0.006231 |
| SNR:19 | NoAvrg_BER:0.009262 | SNR:19 | NoAvrg_BER:0.009209 |
| SNR:20 | BER:0.001799 | SNR:20 | BER:0.001749 |
| SNR:20 | NoAvrg_BER:0.003268 | SNR:20 | NoAvrg_BER:0.003248 |
| SNR:21 | BER:0.000966 | SNR:21 | BER:0.000998 |
| SNR:21 | NoAvrg_BER:0.001677 | SNR:21 | NoAvrg_BER:0.001636 |
| SNR:22 | BER:0.001733 | SNR:22 | BER:0.001778 |
| SNR:22 | NoAvrg_BER:0.002772 | SNR:22 | NoAvrg_BER:0.002883 |
| SNR:23 | BER:0.004920 | SNR:23 | BER:0.004914 |
| SNR:23 | NoAvrg_BER:0.007638 | SNR:23 | NoAvrg_BER:0.007743 |
| SNR:24 | BER:0.000089 | SNR:24 | BER:0.000098 |
| SNR:24 | NoAvrg_BER:0.000220 | SNR:24 | NoAvrg_BER:0.000234 |
| SNR:25 | BER:0.000001 | SNR:25 | BER:0.000001 |
| SNR:25 | NoAvrg_BER:0.000052 | SNR:25 | NoAvrg_BER:0.000052 |
| SNR:26 | BER:0.000408 | SNR:26 | BER:0.000393 |
| SNR:26 | NoAvrg_BER:0.000695 | SNR:26 | NoAvrg_BER:0.000646 |
| SNR:27 | BER:0.000583 | SNR:27 | BER:0.000600 |
| SNR:27 | NoAvrg_BER:0.001222 | SNR:27 | NoAvrg_BER:0.001242 |
| SNR:28 | BER:0.000352 | SNR:28 | BER:0.000381 |
| SNR:28 | NoAvrg_BER:0.000609 | SNR:28 | NoAvrg_BER:0.000625 |
| SNR:29 | BER:0.000107 | SNR:29 | BER:0.000124 |
| SNR:29 | NoAvrg_BER:0.000365 | SNR:29 | NoAvrg_BER:0.000384 |
| SNR:30 | BER:0.000367 | SNR:30 | BER:0.000351 |
| SNR:30 | NoAvrg_BER:0.000720 | SNR:30 | NoAvrg_BER:0.000695 |
SNR Vs. BER values for Experiment 1
| Mean BER | std BER |
| -0.8814 | 0.0006 |
| -0.9711 | 0.0012 |
| -1.0623 | 0.0012 |
| -1.0602 | 0.0009 |
| -1.0884 | 0.0009 |
| -1.5517 | 0.0000 |
| -1.7840 | 0.0002 |
| -1.8977 | 0.0024 |
| -1.4374 | 0.0014 |
| -1.5802 | 0.0021 |
| -1.8490 | 0.0001 |
| -2.1231 | 0.0005 |
| -1.8110 | 0.0028 |
| -2.2696 | 0.0083 |
| -2.0571 | 0.0039 |
| -1.8799 | 0.0019 |
| -2.7203 | 0.0046 |
| -2.5391 | 0.0035 |
| -3.2039 | 0.0151 |
| -2.2033 | 0.0031 |
| -2.7511 | 0.0086 |
| -3.0078 | 0.0099 |
| -2.7556 | 0.0079 |
| -2.3083 | 0.0004 |
| -4.0308 | 0.0285 |
| -6.1938 | 0 |
| -3.3978 | 0.0118 |
| -3.2281 | 0.0086 |
| -3.4365 | 0.0247 |
| -3.9387 | 0.0460 |
| -3.4455 | 0.0137 |
Mean BER & std BER values for Experiment 1
| For N = 1 | For N = 2 | ||
| SNR: 0 | BER:0.144963 | SNR: 0 | BER:0.144537 |
| SNR: 0 | NoAvrg_BER:0.200382 | SNR: 0 | NoAvrg_BER:0.200617 |
| SNR:1 | BER:0.103536 | SNR:1 | BER:0.103496 |
| SNR:1 | NoAvrg_BER:0.153318 | SNR:1 | NoAvrg_BER:0.153312 |
| SNR:2 | BER:0.081079 | SNR:2 | BER:0.081874 |
| SNR:2 | NoAvrg_BER:0.123080 | SNR:2 | NoAvrg_BER:0.123966 |
| SNR:3 | BER:0.056279 | SNR:3 | BER:0.056618 |
| SNR:3 | NoAvrg_BER:0.096223 | SNR:3 | NoAvrg_BER:0.096636 |
| SNR:4 | BER:0.070647 | SNR:4 | BER:0.070241 |
| SNR:4 | NoAvrg_BER:0.103436 | SNR:4 | NoAvrg_BER:0.103023 |
| SNR:5 | BER:0.063094 | SNR:5 | BER:0.063427 |
| SNR:5 | NoAvrg_BER:0.089725 | SNR:5 | NoAvrg_BER:0.090577 |
| SNR:6 | BER:0.020785 | SNR:6 | BER:0.021318 |
| SNR:6 | NoAvrg_BER:0.039970 | SNR:6 | NoAvrg_BER:0.040469 |
| SNR:7 | BER:0.024660 | SNR:7 | BER:0.024455 |
| SNR:7 | NoAvrg_BER:0.040979 | SNR:7 | NoAvrg_BER:0.041170 |
| SNR:8 | BER:0.032986 | SNR:8 | BER:0.032662 |
| SNR:8 | NoAvrg_BER:0.052140 | SNR:8 | NoAvrg_BER:0.052100 |
| SNR:9 | BER:0.023306 | SNR:9 | BER:0.022988 |
| SNR:9 | NoAvrg_BER:0.037168 | SNR:9 | NoAvrg_BER:0.037283 |
| SNR:10 | BER:0.009120 | SNR:10 | BER:0.008878 |
| SNR:10 | NoAvrg_BER:0.017749 | SNR:10 | NoAvrg_BER:0.017499 |
| SNR:11 | BER:0.023258 | SNR:11 | BER:0.023224 |
| SNR:11 | NoAvrg_BER:0.034964 | SNR:11 | NoAvrg_BER:0.034473 |
| SNR:12 | BER:0.023534 | SNR:12 | BER:0.023745 |
| SNR:12 | NoAvrg_BER:0.034579 | SNR:12 | NoAvrg_BER:0.034325 |
| SNR:13 | BER:0.000103 | SNR:13 | BER:0.000101 |
| SNR:13 | NoAvrg_BER:0.000588 | SNR:13 | NoAvrg_BER:0.000648 |
| SNR:14 | BER:0.000016 | SNR:14 | BER:0.000010 |
| SNR:14 | NoAvrg_BER:0.000196 | SNR:14 | NoAvrg_BER:0.000231 |
| SNR:15 | BER:0.000009 | SNR:15 | BER:0.000014 |
| SNR:15 | NoAvrg_BER:0.000209 | SNR:15 | NoAvrg_BER:0.000240 |
| SNR:16 | BER:0.001996 | SNR:16 | BER:0.002008 |
| SNR:16 | NoAvrg_BER:0.003367 | SNR:16 | NoAvrg_BER:0.003535 |
| SNR:17 | BER:0.002367 | SNR:17 | BER:0.002430 |
| SNR:17 | NoAvrg_BER:0.003467 | SNR:17 | NoAvrg_BER:0.003535 |
| SNR:18 | BER:0.000002 | SNR:18 | BER:0.000004 |
| SNR:18 | NoAvrg_BER:0.000010 | SNR:18 | NoAvrg_BER:0.000018 |
| SNR:19 | BER:0.001298 | SNR:19 | BER:0.001367 |
| SNR:19 | NoAvrg_BER:0.002071 | SNR:19 | NoAvrg_BER:0.002116 |
| SNR:20 | BER:0.009918 | SNR:20 | BER:0.009850 |
| SNR:20 | NoAvrg_BER:0.014701 | SNR:20 | NoAvrg_BER:0.014585 |
| SNR:21 | BER:0.000472 | SNR:21 | BER:0.000521 |
| SNR:21 | NoAvrg_BER:0.000769 | SNR:21 | NoAvrg_BER:0.000854 |
| SNR:22 | BER:0.001085 | SNR:22 | BER:0.001169 |
| SNR:22 | NoAvrg_BER:0.001855 | SNR:22 | NoAvrg_BER:0.001917 |
| SNR:23 | BER:0.001360 | SNR:23 | BER:0.001495 |
| SNR:23 | NoAvrg_BER:0.002240 | SNR:23 | NoAvrg_BER:0.002427 |
| SNR:24 | BER:0.000595 | SNR:24 | BER:0.000621 |
| SNR:24 | NoAvrg_BER:0.001258 | SNR:24 | NoAvrg_BER:0.001321 |
| SNR:25 | BER:0.000873 | SNR:25 | BER:0.000820 |
| SNR:25 | NoAvrg_BER:0.001457 | SNR:25 | NoAvrg_BER:0.001422 |
| SNR:26 | BER:0.000003 | SNR:26 | BER:0.000003 |
| SNR:26 | NoAvrg_BER:0.000199 | SNR:26 | NoAvrg_BER:0.000201 |
| SNR:27 | BER:0.000326 | SNR:27 | BER:0.000342 |
| SNR:27 | NoAvrg_BER:0.000637 | SNR:27 | NoAvrg_BER:0.000651 |
| SNR:28 | BER:0.000198 | SNR:28 | BER:0.000216 |
| SNR:28 | NoAvrg_BER:0.000270 | SNR:28 | NoAvrg_BER:0.000262 |
| SNR:29 | BER:0.000000 | SNR:29 | BER:0.000000 |
| SNR:29 | NoAvrg_BER:0.000000 | SNR:29 | NoAvrg_BER:0.000000 |
| SNR:30 | BER:0.000000 | SNR:30 | BER:0.000000 |
| SNR:30 | NoAvrg_BER:0.000071 | SNR:30 | NoAvrg_BER:0.000078 |
SNR Vs. BER values for Experiment 2
| Mean BER | Std BER |
| 0.8394 | 0.0009 |
| 0.9850 | 0.0001 |
| 1.0890 | 0.0030 |
| 1.2483 | 0.0018 |
| 1.1522 | 0.0018 |
| 1.1989 | 0.0016 |
| 1.6767 | 0.0078 |
| 1.6098 | 0.0026 |
| 1.4838 | 0.0030 |
| 1.6355 | 0.0042 |
| 2.0458 | 0.0083 |
| 1.6337 | 0.0005 |
| 1.6264 | 0.0027 |
| 3.9915 | 0.0072 |
| 4.8895 | 0.1323 |
| 4.9486 | 0.1512 |
| 2.6985 | 0.0018 |
| 2.6201 | 0.0081 |
| 5.5089 | 0.1569 |
| 2.8755 | 0.0159 |
| 2.0051 | 0.0021 |
| 3.3048 | 0.0302 |
| 2.9484 | 0.0231 |
| 2.8460 | 0.0291 |
| 3.2160 | 0.0133 |
| 3.0727 | 0.0192 |
| 5.4949 | 0 |
| 3.4765 | 0.0154 |
| 3.6850 | 0.0273 |
| Inf | NaN |
| Inf | NaN |
Mean BER and std BER values for Experiment 2
This thesis presents the design and Implementation of DVB-T2 system in MATLAB software. The basic purpose of this thesis is to check the bit error ratio (BER) and signal to noise ratio (SNR) for DVB-T2 system so that the system could be improved to a better quality. DVB-T2 system is evaluated for mobile users moving at different speeds. It is clearly shown that the mobility has an impact on the received signal, where the SNR goes to zero in some points. This behavior will generate high BER. If the figures for impulse responses are checked for all the three experiments then it is depicted that the Impulse is high for the third experiment where the mobility speed is higher than the first two experiments. The packet data loss is almost zero for the first experiment while it’s increasing in the second and is higher in the third. The number of packet lost confirms this behavior that high losses occurred in the case of high mobility.
Today I am going to show you Sensorless Speed Estimation of Induction Motor in MATLAB. In order to control and estimate the speed of Induction motor, there are many methods proposed by different scientists. The method I have selected in my project is Adaptive method. Using this method, I have controlled the speed of Induction motor using MATLAB software. Matlab software is used for simulation design. The simulation is designed in simulink and the MATLAB version used for designing this project is MATLAB 2010. It is also tested on MATLAB 2012 and 2013. All the details of this project are mentioned below.
If someone wants to buy this project then click on the button shown on right side. Its quite difficult to implement and is designed because of the efforts of our team that's why we haven't made it open source but we have placed a very small purchase amount because mostly it is asekBefore going into the details of Induction motor, let’s first have a look on the mathematical derivations. Few of the well-known methods are:
In order to apply the adaptive method on the Induction motor, there was a need to first design the induction motor on Simulink. For designing the Induction motor on Simulink, mathematical calculations were required. So, my first task was to derive the complete mathematical equations for all the variables of Induction motor.
The basic mathematical model also known as the a-b model (or two-phase equivalent model) of induction motor is given as:
The approach used in this report is to consider the speed as an unknown constant parameter. The reason for choosing this parameter is that it changes slowly as compared to all the other electrical parameters and as it changes slowly so it can be controlled more effectively. The adaptive method techniques are applied on the speed parameter and thus estimated it. This adaptive method approach on speed parameter was first implemented by Shauder and are further enhanced and researched by Peng and Fukao. Using the last two equations of the system (1), I derived the below equations:
Now take the second and third equations of system (1) and divide them by M / LR and then differentiate them w.r.t time and the below equations are obtained:
System (3) gives us the derivative of magnetic fluxes. In order to calculate the error dynamics induced in the system, we need to calculate the estimated values of these magnetic fluxes and then subtract them from the system (3). The estimated values of the magnetic fluxes are as follows:
V (ema, emb) = ½ (e2ma + e2mb)
Using the above equation and the values of ema and emb, we get:
The model designed in MATLAB is shown in the figure 1. This model is performing the simulation of motor moving in both the directions i.e. clockwise and anti-clockwise. It contains four main blocks, which are:
All these four blocks are discussed below in detail:
This block, as the name depicts, is used for generating variable frequencies. In the start, the first model, I generated, was for fixed frequency of induction motor and was also showing just one direction of motor. So, I did few modifications in the model and added this block so that the motor could move both in positive and negative directions and can also move at different frequencies.
Figure 2 shows the parameter block for this block and from this block one can set the frequency of this motor quite easily. From this parameter block, one can set:
By default, I have taken two frequencies, for which the motor will rotate during a cycle.
In order to change the direction of the motor, I have used the phase change. When the voltage applied to the motor reverses its direction, the direction of the motor also reverses. For this simulation, the motor will rotate in clockwise direction when:
And it will reverse the direction, when:
i.e. Vb and Vc are changing their positions. In order to do so I added a phase change in this block and thus for the first 5 sec the motor will move in one direction and for the last 5 sec it will move in the opposite direction automatically.
This block is separately shown in the figure 2. This block takes Vabc as an input and gives output in the form of V(alpha) and V(beta). This conversion is known as Clarke Transformation. This transformation is used in order to simplify the implementation of three phase systems as in Clarke Transformation, a reference signal is obtained. V (gamma) becomes zero in Clarke Transformation that’s why it becomes very easy to use.
In Clarke Transformation, the relation between Vabc and V (alpha) and V (beta) is given as:
If we closely examine the figure 3, then it is shown that inputs coming are Va, Vb and Vc. After that the above equations are applied on these input signals and the output received is V (alpha) and V (beta). In simple words, figure 3 is implementation of Clarke Transformation.
Motor system block is the practical implementation of set of equations shown in the system (1). It is the basic mathematical model of Induction motor shown in figure 5. It is taking V (alpha) and V (beta) as an input along with the load applied on Induction motor. In other words, I can say that this block is the actual Induction motor and I need to apply the adaptive method technique on this block in order to estimate and control its speed.
V (alpha) and V (beta) applied here are the same obtained in the Clarke Transformation explained in the previous section. Outputs of this function are the states which we will study in detail in the fourth section and the derivatives of currents Isa and Isb.
Let’s double click this motor system block and check the functions it’s calculating. The functions of this sub system are shown in the figure 6. As I told earlier, this block is the simulation of system (1), which is also shown below:
As shown in the figure 6, motor block is implementing all the five equations of system (1), which are:
All these functions are shown in the figures 7(a-e).
Figure 7c: Implementation of equation 1 of system 1
Figure 7d: Implementation of equation 4 of system 1
Figure 7e: Implementation of equation 5 of system 1
Figure 7f: Graphical Representation of equation 2 of system 1
Figure 7g: Graphical Representation of equation 3 of system 1
Figure 7h: Graphical Representation of equation 4 of system 1
Figure 7i: Graphical Representation of equation 5 of system 1
After the implementation of all these equations, a complete model of Induction motor has been obtained. Now there’s a need to apply the technique of adaptive method on it so that the speed could be controlled without the help of sensor, which is done explained in detail in the next section.
In order to change the parameter of this system, I have added a parameter block in it shown in the below figure:
Let's have a look at the Speed Estimation Block of Sensorless Speed Estimation of Induction Motor in MATLAB. Speed Estimation is the place where adaptive method technique is applied to estimate the speed of Induction motor. This block is actually implementing the system (3) and system (4) and thus calculating the real speed and the estimated speed of the Induction motor respectively. After the calculation of these speeds, it is further calculating the error dynamics by subtracting the estimated speed from the real speed.
Speed Estimation block is shown in the figure 8. Inputs coming to the speed estimation are the same obtained in the first and second block i.e. V (alpha), V (beta), Isa, Isb, dIsa/dt and dIsb/dt. The functions implemented by this subsystem are shown in the figure 9.
Figure 9: Functions Implemented by System Estimation Block
System (3) and system (4) are implemented in the figure 9, which are as follows:
Thus the outputs of these two blocks will give us the real speed values.
So, the output of these two blocks will give us the value of estimated speed. The internal functions of all these four blocks are shown in figures 10a, 10b, 10c and 10d respectively.
Figure 10a: Implementation of Equation 2 of System 3.
Figure 10b: Implementation of Equation 1 of System 3.
Figure 10c: Implementation of Equation 2 of System 4.
Figure 10d: Implementation of Equation 1 of System 4.
After the calculation of all the four values, the speed estimator block then implemented the system (5), which is:
Implementation of this system 5 is separately shown in the figure 11, which finally gives us the value of estimated speed.
Graph of both the estimated speed and the actual speed is shown in the figure 12.
Figure 12: Graph of Estimated Speed and Actual Speed
Let's have a look at the conclusion of Sensorless Speed Estimation of Induction Motor in MATLAB. Figure 12 shows both the actual and estimated speed induction motor. In the start, the motor is moving at the speed of around 25 rpm, after that the speed is increased to 50 rpm, and the motor starts to rotate in the opposite direction that’s why the graph shows the negative value. Now, it’s moving at 50 rpm in the opposite direction and lastly, it is moving at 25 rpm in the opposite direction. Figure 13 shows the graph for estimated errors. It is quite obvious from the error graph that whenever the speed of the motor fluctuates the error goes quite high. In other words, the acceleration produced in the motor causes the error to increase while the error remains zero when the motor is moving at constant speed, regardless of direction.
Figure 13: Estimated Error Dynamics
So, that's all for today. I hope you have enjoyed Sensorless Speed Estimation of Induction Motor in MATLAB. Will meet you guys in the next tutorial. Till then take care and have fun !!! :)Today two of my juniors came to me for a simple MATLAB term project. It's quite an easy project but i thought to share it for those students who are dealing with basics of MATLAB. Mostly such projects are offered to students in first or second semester when they have very basic knowledge of MATLAB coding and they feel helpless while solving such problems as is the case with those two students. So, let's get started with How to find Roots of Quadratic Equations in MATLAB.
%==== Code Starts Here(www.TheEngineeringProjects.com) ==== clc clf % ============ Taking Inputs From User ============== handle = input('Enter the handle of the function : '); limit = input('Enter the domain limits : '); initial = input('Enter the initial solution estimate : '); k = input('Enter 1 for min, 2 for roots & 3 for both : '); syms x; a1 = 100000; %====== Calculating Roots of the Quadratic Equation ========= func = @(x)handle(1,1)*x^2 + handle(1,2)*x + handle(1,3); root1 = (-handle(1,2) + sqrt((handle(1,2)^2)-(4*handle(1,1)*handle(1,3))))/(2*handle(1,1)); root2 = (-handle(1,2) - sqrt((handle(1,2)^2)-(4*handle(1,1)*handle(1,3))))/(2*handle(1,1)); roots=[root1,root2]; %====== Calculating Minimum Value Within Domain Limits ========= for x = limit(1,1):0.1:limit(1,2) a = func(x); if (a < a1) a1 = a; x1 = x; end if(k==1 || k==3) plot(x,a,'--rs','LineWidth',2,... 'MarkerEdgeColor','k',... 'MarkerFaceColor','g',... 'MarkerSize',10) hold on; end end min = a1; %====== Displaying Roots & Minimum Values ========= if ( k == 1) min end if ( k == 2) roots plot(x,root1,'--rs','LineWidth',2,... 'MarkerEdgeColor','k',... 'MarkerFaceColor','r',... 'MarkerSize',10) hold on; plot(x,root2,'--rs','LineWidth',2,... 'MarkerEdgeColor','k',... 'MarkerFaceColor','r',... 'MarkerSize',10) end if ( k == 3) min roots plot(x,root1,'--rs','LineWidth',2,... 'MarkerEdgeColor','k',... 'MarkerFaceColor','r',... 'MarkerSize',10) hold on; plot(x,root2,'--rs','LineWidth',2,... 'MarkerEdgeColor','k',... 'MarkerFaceColor','r',... 'MarkerSize',10) end %==== Code Ends Here(www.TheEngineeringProjects.com) =======
- First input = [1 5 6]
- Second input = [-1 1]
- Third input = 0
- Fourth input = 3
{kind=link}