The world is undergoing a dramatic transformation, apace transitioning from isolated systems to internet-enabled things capable of merging digital and physical worlds. IoT has created things attainable that were not possible to realize before its emergence into turbulent technology. Solutions together with good Cities, Smart homes, good works, and Connected Devices are all presented offered by IoT and its potential innovations. beyond question, IoT 5 may be a multi-trillion industry in returning years.
IoT is ever-changing the thought of doing business in real-world whereas enabling wireless ...
Hello geeks, welcome to our new project. Here, we are going to make a very useful project which we can use for ourselves or we can use this as a product as well on an industry level.
In this project, we are going to make a water level indicator. We all know it is one of the most essential products because there are many water tanks in every house or office, and most of them are not easily accessible to check the level of water in it and I think most of us faced the problem such as shortage of water as we do not have anything to monitor the exact amount of water available in the tank and this ...
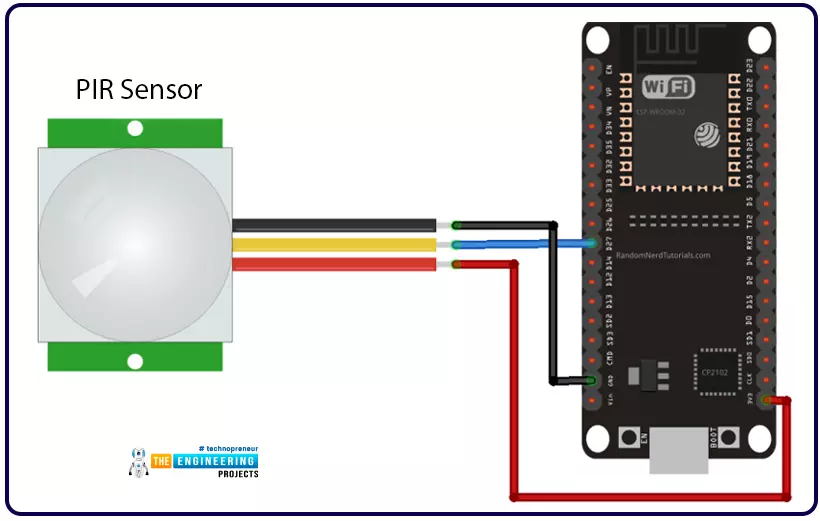
Hello readers, we hope you all are doing great. Welcome to the 4th lecture of Section 5(ESP32 Sensor) in the ESP32 Programming Series. So far, we have discussed the ESP32 built-in sensors in this section. Today, we are going to interface an external embedded sensor(i.e. PIR Sensor) with the ESP32 Microcontroller board. At the start, we will discuss the basics of a PIR Sensor(HC-SR501) i.e. its pinout and working. After that, we will design a simple project to detect the motion with a PIR sensor and ESP32. Finally, we will display the motion detection results on the ESP32 WebServer.
We will ...
Hello Geeks, I hope you all are doing great and enjoying your festive seasons. This time, we have come up with a new project which will make your festival a bit brighter so here comes a Christmas tree.
It is said that Christmas is the center of all the celebrations. Did you guys know the scientist who discovered the light bulb, Thomas Edison and his friends were the first to put up the light bulbs on the Christmas tree, and here we are going to keep that tradition forward? Well, it’s time to gear up for the next season of Christmas being tech-savvy. Hence we have decided to brighten up a Chri ...
Hello readers, we hope you all are doing great. In this tutorial, we are going to demonstrate how to interface and control a servo motor using an ESP32 board. After that, we will demonstrate how to create a webserver to control the servo motor’s shaft position with the ESP32 board.
Servo Motors are among the most important actuators in robotics, with applications ranging from RC planes to automated door locks.
Hardware components required
A servo motor
ESP32 development board
Connecting wires
Breadboard
Servo Motor
There are several specific types of electric motor applications in ...
Hello geeks, welcome to our new project. In this project, we are going to make a very useful and interesting electronics tool that we as engineers or tinkers need in everyday life. We use the capacitor in most of our projects for various purposes such as filters or power supplies. Most of the time, we do not have a provision to measure the capacitor value in our digital multimeter. So, this time we came up with the solution. Hence, we will make our own capacitance measurement tool using Arduino.
Rather than investing in new electronic equipment, we will use an Arduino board and some basic com ...







 1 user
1 user











 Getting Started Guide
Getting Started Guide
 Help Center
Help Center
 Contact us
Contact us
 Doist Blog
Doist Blog
 Privacy
Privacy
 Security
Security
 Terms of Service
Terms of Service
 What's new: Channel Descriptions
What's new: Channel Descriptions




 Top internet of things companies dominating the world
IoT development company
IBM
Global organization of oriented group language of earth
Intel
Google
IoT platform companies
IoT devices companies
IoT security companies
IoT industrial corporations
General electric
Cisco
Microsoft
HITCHI
Apple
Gartner
Oracle
ARM
Accenture
Amazon
HP
Arduino
IDC
Blackberry
Methodology of the ranking
Verizon
Top internet of things companies dominating the world
IoT development company
IBM
Global organization of oriented group language of earth
Intel
Google
IoT platform companies
IoT devices companies
IoT security companies
IoT industrial corporations
General electric
Cisco
Microsoft
HITCHI
Apple
Gartner
Oracle
ARM
Accenture
Amazon
HP
Arduino
IDC
Blackberry
Methodology of the ranking
Verizon