Hello geeks, Welcome to our new project. As most readers have already seen the coffee vending machine or maybe you are drinking coffee while reading this article and if you are a tinker or a geek, it must have come to your mind how to make a coffee vending machine on your own. In today's tutorial, we are going to learn how to make a Smart Coffee Vending Machine using Arduino with Proteus Simulation for the same.
We can use this project for an engineering project’s showcase for electronics, electrical engineering students, and can be used in offices as well.
Coffee is the second most popular drink in the world and it is one of the oldest beverages of the world. According to Wikipedia, more than 2 billion cups of coffee are consumed every day in the ...
Hello friends, I hope everything's going well. Today, I am going to share the 13th chapter in the PCB learning series, where we will discuss the single-layer PCB in detail i.e. definition, construction, advantages, manufacturing, applications etc. So let’s try to absorb everything about the single-layer PCB:
Single-layer PCB overview:
Just a quick recall, PCB stands for a printed circuit board having different electrical components connected with the help of pads and tracks of copper foil, incorporated on an insulating material(substrate).
Single-layer PCBs have only one conductive layer of copper. The PCB board itself has a total of 3 layers in single-layer PCB other than the copper layer which are substrate, solder mask, and silkscreen.
In the past, phenolic aldehyde was us ...
An Analog to Digital Converter (ADC) converts a continuous signal (usually a voltage) into a series of discrete values ??(sequences of bits). The main features are:
Resolution (in analog terms): It is the minimum variation of the analog input voltage that can determine the variation of the LSB, that is of the least significant bit of the output code. Since the quantization step Q corresponds to the LSB, it can be said that the resolution coincides with the quantization step Q (and therefore is measured in Volts). We can say that the quantization step Q corresponds to the LSB because two contiguous quantization bands, each of amplitude Q, are identified by codes that differ only for the least significant bit.
Resolution (in digital terms): It is the number n of bits present at the co ...
The SPI (Serial Peripheral Interface) protocol, or rather the SPI interface, was originally devised by Motorola (now Freescale) to support their microprocessors and microcontrollers. Unlike the I2C standard designed by Philips, the SPI interface has never been standardized; nevertheless, it has become a de-facto standard. National Semiconductor has developed a variant of the SPI under the name Microwire bus. The lack of official rules has led to the addition of many features and options that must be appropriately selected and set in order to allow proper communication between the various interconnected devices. The SPI interface describes a single Master single Slave communication and is of the synchronous and full-duplex type. The clock is transmitted with a dedicated line (not necessari ...
EEPROMs (Electrically Erasable Programmable Read-Only Memories) allow the non-volatile storage of application data or the storage of small amounts of data in the event of a power failure. Using external memories that allow you to add storage capacity for all those applications that require data recording. We can choose many types of memories depending on the type of interface and their capacity.
EEPROMs are generally classified and identified based on the type of serial bus they use. The first two digits of the code identify the serial bus used:
Parallel: 28 (for example 28C512) much used in the past but now too large due to having many dedicated pins for parallel transmission
Serial I2C: 24 (for example 24LC256)
Serial SPI: 25 (for example 25AA080A)
Serial - Microwire: 93 (for ...
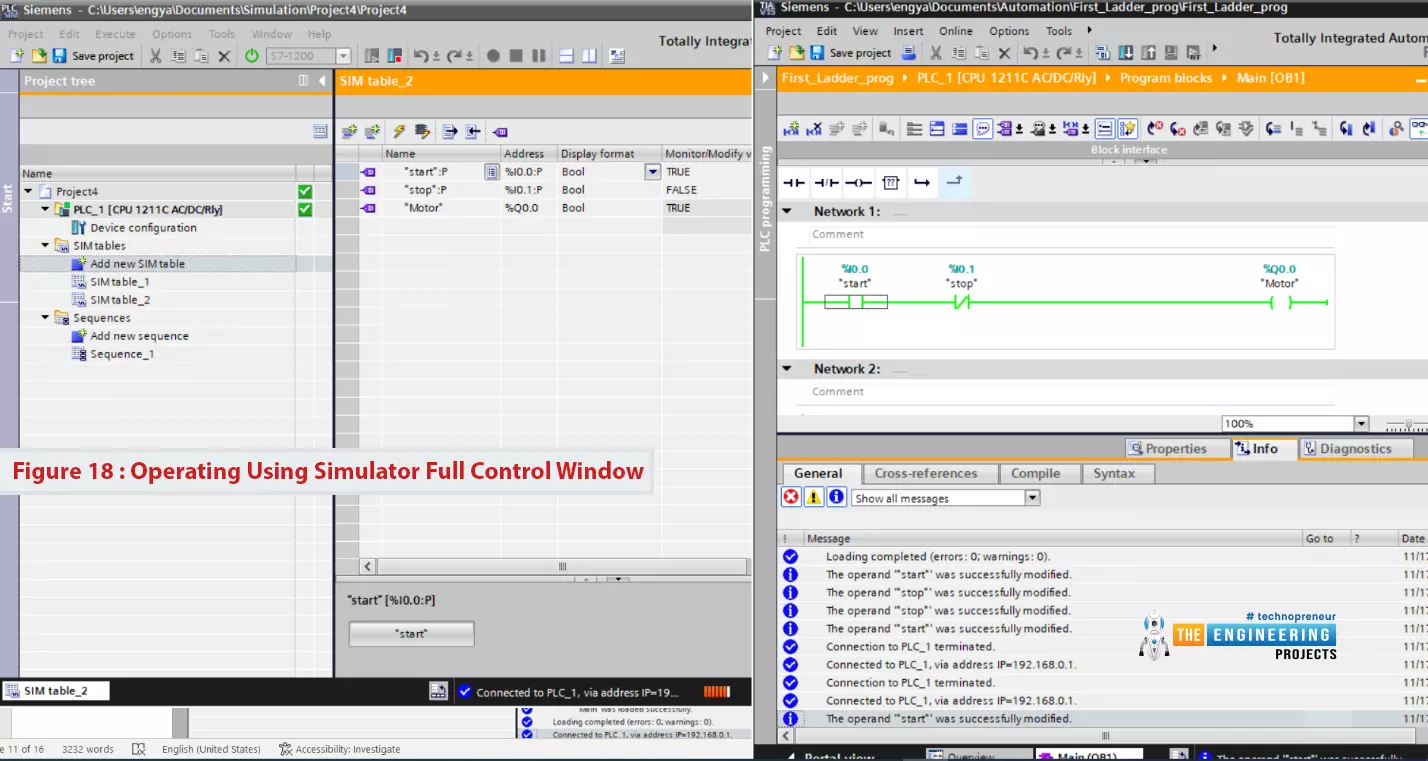
Hello friends, I hope you all are doing great. In today's tutorial, I am going to create the first Ladder Logic Program in PLC Simulator. It's 3rd tutorial in our Ladder Logic Programming Series. In our previous tutorial, we have installed PLC Simulator and now we can say our lab is ready to learn and practice. So let us get to work and get familiar with the ladder logic components.
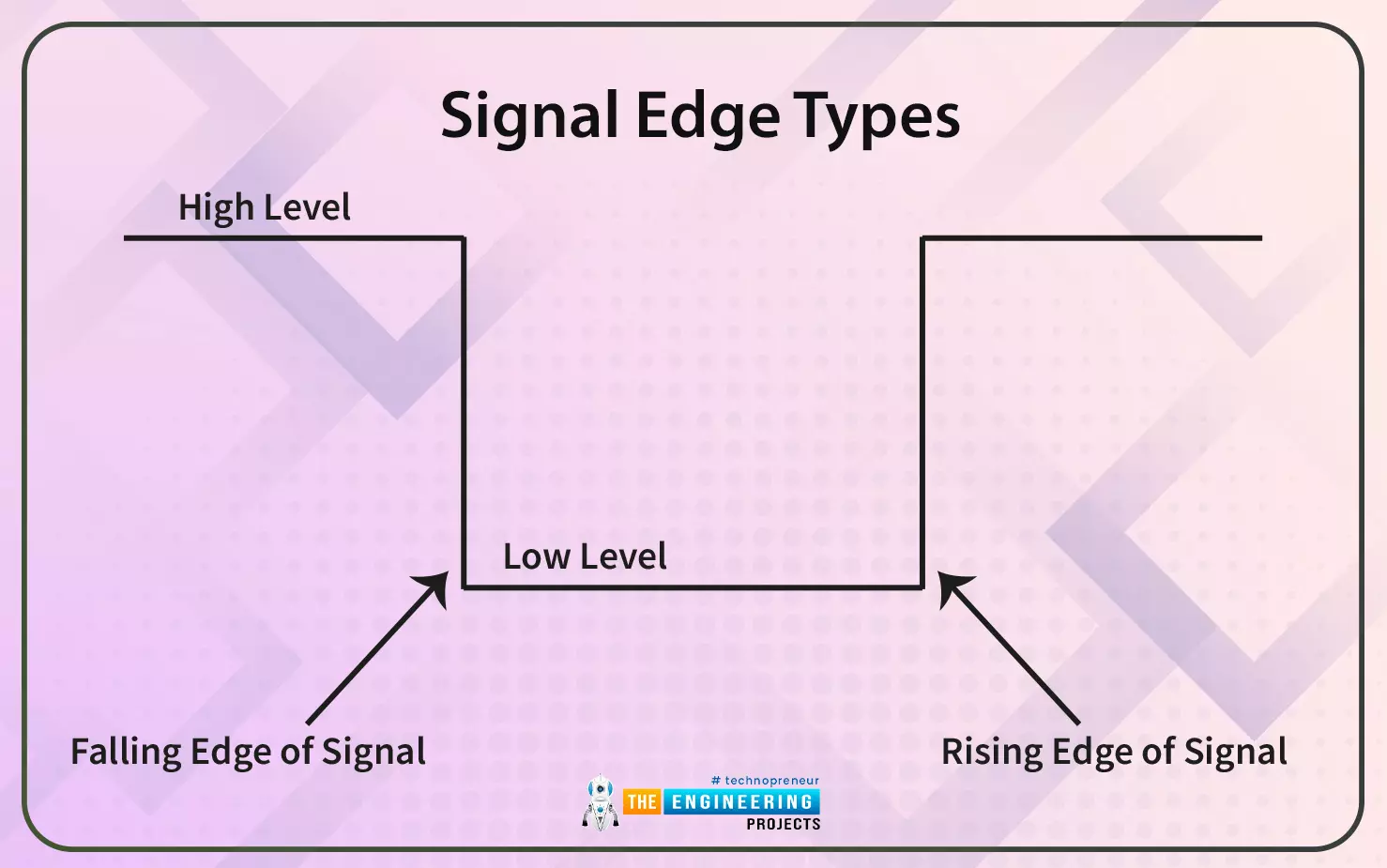
After this article, you will have a complete understanding of PLC contact and coil including their types and possible causes. Because they are the building block of any rung of a ladder logic program. So let us start with ladder logic rung components.
Ladder Logic Contact/Input
In ladder logic programming, a contact represents the input of the system and it could b ...
Hello friends, I hope you are doing very well! In today's tutorial, we will set up a simulation environment for Ladder Logic Programming. It's our second tutorial in Ladder Logic Programming Series. In our previous tutorial, we have seen a detailed Introduction to Ladder Logic Programming and we have seen that this programming language is used for PLC controllers.
As PLC is an Industrial Controller, it comes with built-in relays/transistors(with protection circuitry) and thus is quite expensive as compared to microcontrollers/microprocessors i.e. Arduino, Raspberry Pi etc. Moreover, if you are working on a real PLC, you need to do some wiring in order to operate it. So, in order to avoid these PLC issues at the beginning, instead of buying a PLC o ...
Manufactured parts need a quality surface finish and visual appeal before releasing them to the client or market. Although there are different methods of applying the surface finish, anodizing aluminum colors produce the best results.
There is a wide range of aluminum anodizing colors to choose from; therefore, product developers need to know how to color match before releasing the end product. Let’s examine more on anodizing aluminum parts, how to color anodized aluminum and the common anodized aluminum colors.
What is Aluminum Anodizing?
Anodizing is an electrolytic process that produces excellent mechanical properties to enhance aluminum parts' durability and visual appeal. Manufacturers use the anodiz ...
Hello friends, I hope you all are doing great. Today, I am going to share the 10th chapter in the PCB learning series. So far, we have studied the basics of PCB i.e. What is PCB? Main Types of PCB, techniques to mount components on PCB etc. Now, we are ready to have a look at the complete PCB Fabrication Process.
So, in today's tutorial, I am going to share a detailed guide on PCB Fabrication Process. We will discuss everything related to it i.e. How PCB boards are manufactured? Which material is used to fabricate printed circuit boards? etc. But before starting the Fabrication PRocess, we first have to understand a few terms/features. So, let's get started:
PCB of DVD player:
RoHS-compliant P ...
Hello friends, I hope you all are in good health. Today we will discuss a detailed overview of flexible PCB, its definition, types, advantages and manufacturing. We will also discuss why we need flexible PCB? We will discuss its uses and the reason for its high price, as it's expensive than other PCB types. I will try to deliver you my best knowledge about flexible PCB so you will clear understanding of flexible PCB. So let’s try to absorb everything about flexible PCB.
Flexible PCB overview
For irregular-shaped locations, it was difficult to place hard substrate PCBs. So, as necessity is the mother of invention similarly difficult locations and irregular surfaces are the mother of flexible PCB invention.
Before the 1950s flexible PCBs are not in common use but now they are used ever ...