IoT – the Internet of Things – has revolutionized the way we use and perceive technology over the last couple of decades. From introducing the world to smart homes and cars to envisioning a more efficient office and work environment, IoT has done it all.
We have integrated IoT in our industrial, tech, and agricultural sectors, as well as our personal lives. However, one of the most fascinating ways IoT has influenced our current society is through its contribution to the health and medical sector.
The healthcare sector managed to get the most out of the Internet of Things technology. Utilizing modern sensors to keep a close eye on their patients’ conditions, these IoT systems are making life easier for medical professionals. And while IoT systems cannot run entire healthcare facilities by themselves, they make life easier for doctors in other ways and provide benefits to patients too. Here is how.
IoT sensors, especially those that can measure temperature, pulse and heartbeat, breathing rate, etc. are being deployed in medical facilities all over the world right now. Due to COVID-19, urgent care and walk-in clinic services have gained a lot of popularity.
However, for their safety, healthcare professions maintain a considerable distance from patients at times. So whenever possible, the tests are carried out from a distance, and IoT can help in this regard.
Take the MLX90614 IR temperature sensor used in temperature guns. It can take the reading, then send the doctor the results via an IoT network within the healthcare facility. The doctor can then carry out more tests in an unmanned manner (wherever possible), and then write the prescription. All they have to do is note down the readings, explain the situation, and hit their custom signature stamp on the paper.
Thus, during such times of crisis, a doctor only needs to carry a self-inking signature stamp to work. Hitting their custom signature stamps on the prescriptions, mostly containing their qualifications and name, are all that they have to do manually right now. This is, by no means, is demeaning to their work or responsibility. It just goes to show how IoT is making their life a lot easier, and safer.
Take the AMD-DS-AS0028-1 fingertip sensor as an example here. Pulse oximeters, which are being used all over the world right now to check for dropping oxygen levels in the human body, use these sensors to measure SpO2 levels.
Normally, the measurements are then displayed on a screen on the device or a separate monitor. However, with a proper network connection, this system can be IoT-enabled. That will allow the doctor to receive the pulse oximeter reading at his home, from where they can then advise the patient on what to do next.
A similar case can be carried out for long-distance check-ups. Once the medical devices, like the oximeter or blood pressure machine, get the readings, they can then deliver those numbers to the doctor, who might be living a few hundred miles away. Based on the findings of these devices, the doctor will prescribe a course of action for the patient.
For this system to go fully remote, a high-definition camera is also preferred, because the way a patient looks is also crucial in treatment these days. Thus, a quick look at them can reveal a lot of vital information about their health.
Walk-in and remote health services are just two of the areas that IoT contributes to in the healthcare sector. One of the more vital roles it plays is that it can navigate medical professions in the right direction during a difficult treatment procedure. Of course, IoT does not do this by itself. It utilizes machine learning and artificial intelligence for better results.
Take the latest COVID trends as examples. New strains are popping up every once in a while, and it is getting difficult to keep track of them all. So virologists are gathering samples via unmanned drones or bots and then testing them at labs. The results are then run through various ML algorithms to determine the strain’s origin.
A similar approach is being used to predict the next coronavirus. The AI used here can classify the animals based on their chances of forming a new coronavirus.
And as we continue to explore more aspects of IoT, we will keep coming up with newer innovations that can benefit the healthcare sector, as well as other fields.
Hello readers, hope you all are doing great. In this tutorial, we will discuss low power modes in ESP32, their purpose and their implementation to increase the battery life by reducing power consumption.
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig.1
Along with multiple wireless and processing features, ESP32 also provides us with a power-saving feature by offering sleep modes. When you are powering the ESP32 module from the live supply using an adaptor or a USB cable, there is nothing to worry about power consumption. But when you are using a battery, as a power source to ESP32, you need to manage the power consumption for longer battery life.
When ESP32 is in sleep mode, a small amount of power is required to maintain the state of ESP32 in RAM (random access memory) and retain necessary data. Meanwhile, the power supply won’t be consumed by any unnecessary peripheral or inbuilt modules like Wi-Fi and Bluetooth.
ESP32 offers 5 power modes. Each mode is configurable and offers different power-saving capabilities:
Fig. 2
Fig 3
For a better understanding of low power modes in ESP32, we are going to implement deep sleep mode in esp32 and will also discuss how to wake up the device from deep sleep mode.
To implement deep sleep modes we are going to use another ESP32 feature that is Capacitive Touch Sensing pins. These pins can sense the presence of a body that holds an electric charge.
So we are going to use these touch-sensitive pins for waking up ESP32 from deep sleep mode using the Arduino IDE compiler.
In Arduino IDE examples are given for deep sleep mode with various wake-up methods.
#define Threshold 40 /* Greater the value, more the sensitivity */ RTC_DATA_ATTR int bootCount = 0; touch_pad_t touchPin; /* Method to print the reason by which ESP32 has been awaken from sleep */ void print_wakeup_reason(){ esp_sleep_wakeup_cause_t wakeup_reason; wakeup_reason = esp_sleep_get_wakeup_cause(); switch(wakeup_reason) { case ESP_SLEEP_WAKEUP_EXT0 : Serial.println("Wakeup caused by external signal using RTC_IO"); break; case ESP_SLEEP_WAKEUP_EXT1 : Serial.println("Wakeup caused by external signal using RTC_CNTL"); break; case ESP_SLEEP_WAKEUP_TIMER : Serial.println("Wakeup caused by timer"); break; case ESP_SLEEP_WAKEUP_TOUCHPAD : Serial.println("Wakeup caused by touchpad"); break; case ESP_SLEEP_WAKEUP_ULP : Serial.println("Wakeup caused by ULP program"); break; default : Serial.printf("Wakeup was not caused by deep sleep: %d\n",wakeup_reason); break; } } /* Method to print the touchpad by which ESP32 has been awaken from sleep */ void print_wakeup_touchpad(){ touchPin = esp_sleep_get_touchpad_wakeup_status(); switch(touchPin) { case 0 : Serial.println("Touch detected on GPIO 4"); break; case 1 : Serial.println("Touch detected on GPIO 0"); break; case 2 : Serial.println("Touch detected on GPIO 2"); break; case 3 : Serial.println("Touch detected on GPIO 15"); break; case 4 : Serial.println("Touch detected on GPIO 13"); break; case 5 : Serial.println("Touch detected on GPIO 12"); break; case 6 : Serial.println("Touch detected on GPIO 14"); break; case 7 : Serial.println("Touch detected on GPIO 27"); break; case 8 : Serial.println("Touch detected on GPIO 33"); break; case 9 : Serial.println("Touch detected on GPIO 32"); break; default : Serial.println("Wakeup not by touchpad"); break; } } void callback(){ //placeholder callback function } void setup(){ Serial.begin(115200); delay(1000); //Take some time to open up the Serial Monitor //Increment boot number and print it every reboot ++bootCount; Serial.println("Boot number: " + String(bootCount)); //Print the wakeup reason for ESP32 and touchpad too print_wakeup_reason(); print_wakeup_touchpad(); //Setup interrupt on Touch Pad 3 (GPIO15) touchAttachInterrupt(T3, callback, Threshold); //Configure Touchpad as wakeup source esp_sleep_enable_touchpad_wakeup(); //Go to sleep now Serial.println("Going to sleep now"); esp_deep_sleep_start(); Serial.println("This will never be printed"); } void loop(){ //This will never be reached }
Fig 12
Fig. 13 waking up esp32 using capacitive sensitive GPIO pin
We have attached a screenshot from the serial monitor for reference.Fig. 14
#define uS_TO_S_FACTOR 1000000ULL /* Conversion factor for micro seconds to seconds */ #define TIME_TO_SLEEP 5 /* Time ESP32 will go to sleep (in seconds) */ RTC_DATA_ATTR int bootCount = 0; /* Method to print the reason by which ESP32 has been awaken from sleep */ void print_wakeup_reason(){ esp_sleep_wakeup_cause_t wakeup_reason; wakeup_reason = esp_sleep_get_wakeup_cause(); switch(wakeup_reason) { case ESP_SLEEP_WAKEUP_EXT0 : Serial.println("Wakeup caused by external signal using RTC_IO"); break; case ESP_SLEEP_WAKEUP_EXT1 : Serial.println("Wakeup caused by external signal using RTC_CNTL"); break; case ESP_SLEEP_WAKEUP_TIMER : Serial.println("Wakeup caused by timer"); break; case ESP_SLEEP_WAKEUP_TOUCHPAD : Serial.println("Wakeup caused by touchpad"); break; case ESP_SLEEP_WAKEUP_ULP : Serial.println("Wakeup caused by ULP program"); break; default : Serial.printf("Wakeup was not caused by deep sleep: %d\n",wakeup_reason); break; } } void setup(){ Serial.begin(115200); delay(1000); //Take some time to open up the Serial Monitor //Increment boot number and print it every reboot ++bootCount; Serial.println("Boot number: " + String(bootCount)); //Print the wakeup reason for ESP32 print_wakeup_reason(); /* First we configure the wake up source We set our ESP32 to wake up every 5 seconds */ esp_sleep_enable_timer_wakeup(TIME_TO_SLEEP * uS_TO_S_FACTOR); Serial.println("Setup ESP32 to sleep for every " + String(TIME_TO_SLEEP) + " Seconds"); /* Next we decide what all peripherals to shut down/keep on By default, ESP32 will automatically power down the peripherals not needed by the wakeup source, but if you want to be a poweruser this is for you. Read in detail at the API docs http://esp-idf.readthedocs.io/en/latest/api-reference/system/deep_sleep.html Left the line commented as an example of how to configure peripherals. The line below turns off all RTC peripherals in deep sleep. */ //esp_deep_sleep_pd_config(ESP_PD_DOMAIN_RTC_PERIPH, ESP_PD_OPTION_OFF); //Serial.println("Configured all RTC Peripherals to be powered down in sleep"); /* Now that we have setup a wake cause and if needed setup the peripherals state in deep sleep, we can now start going to deep sleep. In the case that no wake up sources were provided but deep sleep was started, it will sleep forever unless hardware reset occurs. */ Serial.println("Going to sleep now"); Serial.flush(); esp_deep_sleep_start(); Serial.println("This will never be printed"); } void loop(){ //This is not going to be called }
Fig 15
Fig. 16
Fig. 17
Fig. 18
Fig. 19
Fig 20
This concludes the tutorial. I hope you found this useful, and I hope to see you soon for the new ESP32 tutorial.
Hello readers, I hope you all are doing great. Welcome to the 3rd Lecture of Section 2 in the ESP32 Programming Series. In this tutorial, we are going to discuss another important feature of ESP32 i.e. PWM(Pulse Width Modulation).
Pulse Width Modulation is a technique to reduce the voltage by pulsating it. In today's lecture, we will first understand the basic concept of PWM, and after that will design two projects to fully grasp it. In the first project, we will control the brightness of an LED, while in the second one, we will control the speed of a DC Motor.
Before going forward, let's first have a look at the PWM working:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
PWM is used to control the power delivered to the load by pulsating the ON-Time of the voltage pulse, without causing any power loss. Let's understand the PWM concept with the help of below image:
Suppose a DC Motor runs at 200RPM over 5V. Now, if we want to reduce its speed to 100 RPM, we need to reduce its input voltage to 2.5V(approx). So, either we can replace the 5V battery with a 2.5V Battery or use a PWM circuit to reduce the voltage level from 5V to 2.5V. In this specific case, the PWM pulse will be ON for 50% of the time and get OFF for the remaining 50% of the time.
The behavior of the PWM signal is determined by the following factors:
As you can see in the below figure, we have taken two signals for a duration of 1 second. The first signal completes 10 Cycles in 1 second, so we can say it has a frequency of 10Hz, while the second one has a frequency of 5Hz as it completes 5 cycles in 1 second. So, I hope now it's clear that the number of cycles per second is the frequency of a signal.
Duty Cycle is the ratio of ON time(when the signal is high) to the total time taken to complete the cycle. The duty cycle is represented in the form of a percentage (%) or ratio. Let's understand the PWM Duty Cycle with the help of below image:
The resolution of a PWM signal defines the number of steps it can have from zero power to full power. The resolution of the PWM signal is configurable for example, the ESP32 module has a 1-16 bit resolution, which means we can configure maximum a of 65536 (2^16) steps from zero to full power.
In the ESP WROOM-32 module, there are 16 PWM channels. All the channels are divided into two groups containing 8 channels in each group. The resolution can be programmed between 1 to 16 bits and frequency also depends upon the programmed resolution of the PWM signal.
Now
For the demonstration of PWM in ESP32 we are going to explain two examples:
We are using Arduino IDE to compile and upload the code into the ESP WROOM-32 board.
// Global variable declaration to set PWM properties
const int ledChannel = 0; // select channel 0
const int resolution = 8; //8-bit resolutin i.e., 0-255
const int frequency = 5000; // set frequency in Hz
int dutyCycle = 0;
void setup()
{
Serial.begin(115200);
ledcSetup(ledChannel, frequency, resolution); // configure LED PWM functionalities
ledcAttachPin(LED_BUILTIN, ledChannel); // attach the channel to the GPIO to be controlled
}
void loop()
{
while(dutyCycle <200)
{
ledcWrite(ledChannel, dutyCycle++); // changing the LED brightness with PWM
Serial.print(" duty Cycle ++ :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
while(dutyCycle>0)
{
ledcWrite(ledChannel, dutyCycle--); // changing the LED brightness with PWM
Serial.print(" duty Cycle -- :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
}
// Global variable declaration to set PWM properties
const int ledChannel = 0; // select channel 0
const int resolution = 8; //8-bit resolutin i.e., 0-255
const int frequency = 5000; // set frequency in Hz
int dutyCycle = 0;
Serial.begin(115200);
ledcSetup(ledChannel, frequency, resolution); // configure LED PWM functionalities
ledcAttachPin(LED_BUILTIN, ledChannel); // attach the channel to the GPIO to be controlled
while(dutyCycle <200)
{
ledcWrite(ledChannel, dutyCycle++); // changing the LED brightness with PWM
Serial.print(" duty Cycle ++ :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
while(dutyCycle>0)
{
ledcWrite(ledChannel, dutyCycle--); // changing the LED brightness with PWM
Serial.print(" duty Cycle -- :");
Serial.println(dutyCycle); // display the duty cycle on serial monitor
delay(5);
}
Fig. 9 Serial plotter PWM output
Fig. 10
In this example, we are going to implement PWM using ESP WROOM-32 to control the speed of a DC motor.
The speed of the DC motor depends upon the input power supply. So, by varying the power input we can also vary (increase or decrease) the speed of DC motor.
Hardware components required:
L298N motor driver: A motor driver is used between the ESP32 board and DC motor to resolve the power compatibility issues.
Both the ESP32 board and DC motor operate at different power ratings due to which you can not connect the two devices directly. So a motor driver is used to receive a low power input from the ESP32 board and drive/run DC motor at slightly high power.
L298N can drive a DC motor that operated between 5 to 35 voltage range and maximum current of 2A.
There are various DC motor drivers available in the market for example L293D, DRV8833, MAX14870 single brushed motor driver etc. You can choose the driver of your choice depending upon the application and power ratings.
Fig. 11
FIG. 12 IC L298N pin-out
| IN_1 | IN_2 | Rotation |
| HIGH | LOW | DC motor rotates in a clockwise direction |
| LOW | HIGH | The motor rotates in an anti-clockwise direction |
| LOW | LOW | Motor STOP |
| HIGH | HIGH | Motor STOP |
Table 1
//configure GPIO pins to connect motor driver
int enable1Pin = 14;
int M_Pin1 = 26;
int M_Pin2 = 27;
// Setting PWM properties
const int freq = 10000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 150;
void setup()
{
Serial.begin(115200);
// sets the pins as outputs:
pinMode(M_Pin1, OUTPUT);
pinMode(M_Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
//Configure LED PWM functionalities
ledcSetup(pwmChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(enable1Pin, pwmChannel);
Serial.print("Testing DC Motor...");
}
void loop()
{
// Move the DC motor in anti-clockwise direction at maximum speed
Serial.println("Moving reverse");
digitalWrite(M_Pin1, LOW);
digitalWrite(M_Pin2, HIGH);
delay(500);
// Move DC motor forward with increasing speed
Serial.println("Moving Forward");
digitalWrite(M_Pin1, HIGH);
digitalWrite(M_Pin2, LOW);
//----while loop----
while (dutyCycle <= 255)
{
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Speed increasing with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle +5;
delay(100);
}
while (dutyCycle >150)
{
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Speed decreasing with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle -5;
delay(100);
}
// _____Stop the DC motor
Serial.println("STOP DC motor");
digitalWrite(M_Pin1, LOW);
digitalWrite(M_Pin2, LOW);
delay(500);
}
//configure GPIO pins to connect motor driver
int enable1Pin = 14;
int M_Pin1 = 26;
int M_Pin2 = 27;
// Setting PWM properties
const int freq = 10000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 150;
Serial.begin(115200);
// sets the pins as outputs:
pinMode(M_Pin1, OUTPUT);
pinMode(M_Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
//Configure LED PWM functionalities
ledcSetup(pwmChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(enable1Pin, pwmChannel);
Fig. 20
Fig. 21 Increasing speed
Fig. 22 Reducing speed
Fig. 23 STOP DC motor
Fig. 24 PWM output on serial monitor
Fig. 25 PWM output on Serial Plotter
This concludes the tutorial. I hope you found this useful, and I hope to see you soon for the new ESP32 tutorial.The nearshoring phenomenon is a global economic trend that has been going on for decades. The phenomenon is defined as moving a company’s operations to a country that is in close proximity to the company’s home base.
Nearshoring offers many benefits in terms of cost savings, but it also has many drawbacks. It can have a negative effect on wages for local workers, and it can also have an impact on the environment if the process involves bringing in outsourced goods from overseas.
To conclude, nearshoring often benefits both companies and consumers who are looking for affordable goods at low prices. However, it can have a negative effect on wages and local jobs in the long run.
It's a great way for companies with smaller budgets to have more resources for other aspects of their business. However, it isn't without its challenges. For starters, a company will need someone on-shore to manage the team abroad and provide direction on how things should be done. In addition, there are cultural differences that may need to be addressed - such as different time zones or mores that may not line up with American values.
Nearshoring is becoming more popular because of the benefits it offers for both the outsourcing company and the nearshore company.
Nearshore outsourcing provides cost savings to companies that are looking to outsource their work. It offers lower overall risk than offshore outsourcing through the protection of intellectual property and by having better communications with the workforce.
While offshoring has been around for decades, nearshoring started gaining popularity in recent years due to its relative proximity to home markets, enabling companies to make quick decisions about products, services, marketing approaches, etc., which can be challenging when you are thousands of miles away. Nearshoring is appealing because it provides cost savings and lower risk than offshoring.
Nearshoring is a strategic sourcing technique that can be used to lower the cost of labor. It is also helpful in reducing the production lead time by enabling production capacity to be shared among different regions while centralizing key functions.
Nearshoring allows companies to take advantage of low-cost labor without having to relocate their manufacturing facilities. Through nearshoring, companies are able to maintain control over design and marketing while lowering production costs through outsourcing manufacturing processes abroad for example in China or India.
There are many countries in the world that offer a nearshore workforce and they differ in terms of their cost and quality. Some countries like India and China, with low labor costs and large populations, are popular outsourcing destinations. Other countries such as Indonesia and Malaysia, offer higher quality work based on their educational system. Nearshoring in Europe is also becoming more and more popular because of the low costs and good quality of the work.
There are many factors to take into account when outsourcing business processes or operations to a country. The type of work you need to be done will determine the country you choose for your operations, but there is one key factor that is often overlooked: the availability of human capital. Countries vary in terms of how educated their population is and what languages they speak, which can give an edge when it comes to choosing a country for your overseas operations.
The most prominent disadvantage is that organizations will lose vital skills and know-how when they outsource their projects. They may also lack the flexibility in decision-making for both short and long-term goals due to limitations on management decisions brought about by working with a third-party company. Organizations will also have a difficult time transferring any of their employees to different locations if they decide they want them closer to home in order for them to take care of family issues or have more opportunities for growth.
A good security system includes an alarm, immobilizer, and battery backup if you lose power to your car for any reason. It should have a remote lock/unlock capability which can be helpful if someone finds or steals your keys. You can even get systems these days that notify you on your phone if someone is trying to start your car.
The system should also have a GPS vehicle tracking device if your car is stolen. The police can track the car down and return it to you. The GPS device should enable you to monitor your car and what routes they have taken. Some of these devices will even allow you to set up alerts if the vehicle has been moved at any time during its idle state, which is excellent for catching thieves in action and alerting authorities immediately.
An added benefit of using a GPS tracking service is protecting your car from being towed. If thieves tow your vehicle, you can log into the service and search to see where it has been taken so that you know who stole it and call authorities immediately.
An excellent security system needs to be fitted with an alarm that will go off when someone unauthorized tries to open the car. The louder and more intrusive the alarm, the better. This way, the car's owner will be notified of a possible theft attempt and take precautions. You need to choose an alarm that alerts you when the car is being tampered with and one that can be activated remotely.
One way to prevent your car from being stolen is to install a steering lock. This will make it difficult for thieves to drive off with the car. There are a few different types of steering locks available on the market. A popular type is the club lock, which wraps around the steering wheel and prevents it from being turned.
Another option is to install a car alarm with a steering lock feature. This will sound an alarm if someone tries to move the car. Some cars come with a built-in steering lock that is activated when turned off.
If your car doesn't have a built-in steering lock, you can buy an aftermarket one to use. Whichever option you choose, make sure to properly secure the steering lock so that it cannot be easily removed. Another option is to use a wheel clamp. This will immobilize the car and make it difficult for thieves to steal.
Both of these solutions are a great deterrent against car theft and will help to protect your vehicle. Be sure to use them if you are concerned about your car being stolen.
This may seem like a no-brainer, but many people forget to do this essential step. Make it a habit to always lock your car doors and windows when you're not in it. This will make it more difficult for thieves to access your vehicle. If you're not in a hurry, you can also roll up your windows all the way and shut the doors.
If someone stops next to your car asking for help or directions, don't get out. Stay in your car and keep the doors locked. This allows criminals to unlock it from outside of the vehicle. Many times they will open already unlocked cars with this tactic.
The simplest thing you can do to keep your car from being stolen is always to lock your doors after getting out or entering the vehicle. This is especially important if you habit leaving your car running when you run into the store.
If you park your car in a well-lit area, it will be less likely to be targeted by thieves. Try to avoid parking in isolated or dark areas whenever possible. If you have a garage, use it.
If you have to park on the street, try finding a well-lit spot near other cars. This will make your vehicle less of a target for thieves. In a public parking lot, always park in an area close to the entrance and visible.
If you park under a tree, try to avoid parking near an overhanging branch that thieves could use as leverage for opening your car door or climbing inside. If possible, choose brightly lit areas with surveillance cameras nearby so the footage can be used to identify thieves in case they steal your vehicle.
When looking at potential spots to park, always be aware of your surroundings and look for any suspicious activity. If you see anything that makes you uncomfortable, find another spot to park in.
One of the best ways to prevent your car from being stolen is to not leave any valuables in it. If you have expensive items in your car, it will be more likely for thieves to target your vehicle. So, always make sure to take your belongings with you when you exit your car.
If you have to leave something in your car, try to keep it out of sight. You can put it in the trunk or under the seats. If you need to put things in the trunk or in the backseat, make sure to lock them up so that thieves can't get to them. You should also do this before you reach the parking lot so that thieves can't see what you're doing.
Remember, the best way to prevent your car from being stolen is by taking precautions and being vigilant about your surroundings. You can make it much more difficult for thieves to get their hands on your vehicle by following these tips.
Hello! Readers, I hope you are pretty good. I am here with a new article to enhance your knowledge about advanced technologies. Today, we will have a detailed overview of the Manufacturing Process of Multilayer PCB. First, we will have a look at its basic definition, why there Is a need for this new type of PCB in presence of single layer and double layer PCBs. What are the merits and demerits of multilayer PCBs and pedagogy behind the construction process of these PCBs? Let’s start to take in all information about these PCBs. I try my best to deliver all of my research capacity for doing this job.
As to the name, it's clear that multi-layer PCBs are those which have several conductive layers over substantial material which is knowns as substrate. Unlike single layer and double layer PCBs which consist of one and two copper foil layers respectively, multilayer PCBs contain more than three lays on a single board.
Before discussing the multi-layer PCBs let put a throwback to What’s PCB. How are they classified and what are they used?
The word PCB comes from a printed circuit board that consists of sleeky copper chips on it which are conductive. These tracks are linked with each other electrically.
In order to manufacture a PCB board, you need to take the help of a PCB Fabrication company. There are many online PCB companies available. where you can place your PCB order on their official website. While placing your order, you need to select all your specifications/requirements and they will give you the cost and time to complete it. Let's place an order of Multilayer PCBs on PCBWay Fabrication House. PCBWay is a well-renowned PCB Fabrication house, provides excellent prices and discounts on first orders. Moreover, they have an excellent support team, ready to help you, 24/7. So, let's place our PCB order:
That's how easy, you can place a manufacturing order for PCB.
There are many ways by which we can categorize different types of PCB. Most commonly they are classified on basis of their layers , types of substructure material , conductive layers and rigidness of the boards, etc. Now put a little thought into describing these methods.
This methodology divides PCBs into single-layer PCB , double-layer PCB, and multi-layer PCB . if PCB has a computerized structure on one side then it terms a single layer PCB. if they have a circuit on both sides of the board then it is termed as double-layer PCB but with the invention of technology and with the enhancement of our need we require complex electronic structures which take less space but do more than one task on a single device. Due to which we mounted more than two layers over a single board to form a multi-layer PCB. It has more layers and flexibility than two earlier PCBs which are single layer PCB and double layer PCB. Under the present rank of technology, we can form PCB having almost 32 layers.
The material which is mostly used in the preparation of PCBs is fiberglass, cyanate ester, polyamide, and polyester reinforcement. The substantially material should be
This method sort out the PCBs on the basics of consistency of copper foil and the breadth of conductor route onboard. The board ness of a copper layer may alter from 0.0014 to 0.0042. These factor combined determines the cross-sectional area of the board. Which in return decides how much current can a conductor carry.
For offering the reinforcement to the circuit which must have an electrical connection between them we require a rigid PCB. To furnish the rigidity, the thickness of the board must be almost 1.6mm. variety of substantial materials are used for this purpose.
There are three kinds of PCB as given below
One biggest issue faced by manufactures while dealing with fabrication of multi-layer PCBs is drilling hole technology.
We can make an electrical connection between components which present on several layers of multilayer PCB by using different methodologies which we are given below ;
As we discuss in the previous article VIA is a vertical hole on board that is then filled with metal foil for interconnecting the component. Different modes of via to tackle this situation are elaborated below ;
By using this technique we can join components of the upper side of multilayer PCBs
By using this pedagogy we can link the internal lays of multi-layer PCBs.
A blind via can link the topmost layer with internal layers of multilayer PCB.
Here we discuss under which situation we preferred multilayer PCB over the other two.
To get better-fabricated multi-layer PCBs one should follow these steps
There are many merits of multi-layer PCBs. Let’s start to grasp the knowledge about advanced technology rewards.
With the aid of multi-layer PCBs, we can have boards which although are small in size but are more compatible to tackle problems.
As we know that there is some raw fact about everything. Multi-layer PCBs also have a demerit. The weakened point of multi-layer PCBs are discussed below;
Multi-layer PCBs have outstanding features. This worthy characteristic makes it popular for usage. Multi-layer PCBs have applications in household appliances, industrial works, wireless computing, ballistic capsule, and many other instrumentations. Multi-layer PCBs have distinguishing characteristics in the development of vast practical applications. Some applications of Multi-layer PCBs are illustrating below;
In the end, we conclude that there are more number layers in multi-layer PCBs than single and double-layer PCBs. Multi-layer PCBs have Unmatched properties, valuable applications but in the end, nothing is perfect each technology has some drawbacks like this multi-layer PCBs also have some drawbacks.
In modern computing, the demand for multi-layer PCBs is more than the other two PCBs.That’s all for today’s article. I hope you've got enjoyed the article and build a grip on the understanding points. However, if you continue to face any skepticism concerning multi-layer PCB then please be at liberty to depart your queries within the comment section. I'll give a solution to those inquiries to the simplest of my data and researching skills. Also, give North American country along with your innovative feedbacks and suggestions you improve the standard of our work and supply you content in keeping with your wants and expectations. keep tuned! thanks for reading this text.
Hello readers, hope you all are doing great. In this tutorial, we will discuss another ESP32 protocol that is Web Socket and we will also explain how to create a web server using web socket protocol with ESP32. So, we will have a look at What is a web socket server, How web socket protocol is different from HTTP protocol, What is handshaking in networking, Three-way handshaking, Web socket application, Creating web socket server using ESP32 module etc. Let's get started:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig 1 Web-socket server
A Web Socket is a full-duplex (both the server and the client can send and receive data at the same time) computer communication protocol. Web socket protocol, like HTTP (hypertext transfer protocol), also works in server and client communication format. A web socket uses a process known as handshaking to establish communication between the server and client. This protocol is also known as the stateful protocol. When a client device requests communication with the server, a connection is established between the server and the client, and the connection remains in place until either the server or the client terminates it.
Fig. 2 HTTP protocol
Fig. 3 web socket protocol
In TCP/IP (transmission control protocol/ internet protocol) network, three-way handshaking is used to create a communication channel between server and client.
Three-way handshaking steps are:
Fig. 5 Three-way handshaking
Web socket is used in real-time applications where a client is required to respond quickly to a change or update. The various web socket applications are:
To create a web socket server using ESP32 we are using Arduino IDE as a compiler. Arduino IDE will compile the code and will also upload the compiled code into the ESP32 hardware module.
If you are not familiar with using the Arduino IDE compiler for ESP32 programming then follow our #1 tutorial that is about Introduction to ESP32 programming series.
https://github.com/me-no-dev/AsyncTCP
https://github.com/me-no-dev/ESPAsyncWebServer
Follow our tutorial Introduction to ESP32 programming series to learn about adding a library in Arduino IDE.
Fig. 6 Libraries
Fig. 10 <style> tag
Fig: 11 Styling the button
Fig. 12 <body> tag
Fig. 13 script tag
Fig 14 initWebSocket()
Fig. 15 Update LED status on the web page
Fig. 16 Notify clients
Fig. 17 handles web (client) socket message
Fig. 19 Placeholder
Fig. 20
Fig. 21 Wifi status
Fig. 22
Fig. 23
Fig. 24
Fig 26 Arduino IDE Serial monitor
Fig. 27 Web page displaying LED status HIGH
Fig 28 Web page displaying LED status LOW
Fig. 29 ESP32 LED HIGH
This concludes the tutorial. I hope you find it helpful. In our next tutorial, we will discuss PWM (pulse width modulation) using ESP32.
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
Fig 1 Interrupt
Polling is a process that performs continuous monitoring. Basically, the processor continuously monitors the state of a specific device or a peripheral, and when the status of the device satisfies the condition, the device executes the task that was required. Then it moves on to the next device to monitor until each one has been served. The processor performs no other operations and devotes all of its processing time to monitoring, and all other tasks are suspended until the current one is completed.
Fig 2 polling vs Interrupt
So, to overcome the disadvantage of the polling method, we chose the Interrupt method.
ESP32 module has a dual-core processor and each core consists of 32 interrupts. Basically interrupts are of two types:
Fig 3 ESP32 software interrupt
Software interrupts are internal which occur in response to the execution of a software instruction. For example, a timer can be used to generate a software interrupt.
Fig 4 ESP32 software interrupt
Hardware interrupts are the external interrupts that are caused by an external event. For example, an external push button connected to ESP32’s GPIO or a motion sensor will generate an interrupt (event) if a motion is detected.
When an interrupt occurs during normal program execution, an ISR (interrupt service routine) or an interrupt handler is called into action. The normal program execution will be halted, and the interrupt will be executed based on the priority level of the interrupt.
Fig. 5 Interrupt service routing
Every interrupt has a fixed memory location where the address of the ISR is stored.Interrupt Vector Table refers to a memory table or memory table that is used to store the location of an interrupt service routine.
Note: IRAM_ATTR attribute should be defined for interrupt handling. As per the ESP32 datasheet interrupt service routine should run inside the RAM. Because inside the RAM it is fast to execute a code than in flash memory and when an interrupt occurs all the other tasks will be blocked or halted till the time interrupt request is served.
When an interrupt occurs, the microcontroller will go through the following steps:
Fig. 6 ESP32 Interrupt Program flow
We are using Arduino IDE to compile the code and then upload into the ESP32 board.
If you are not familiar with the procedure of getting started with Arduino IDE and hoe to compile a code in Arduino IDE then follow our previous tutorial that is Introduction to ESP32 programming series.
// Set GPIOs for LED and Push button const int led = 2; const int button = 0; // Timer: Auxiliary variables #define timeSeconds 10 unsigned long now = millis(); unsigned long lastTrigger = 0; boolean startTimer = false; // Checks if button input was detected, sets LED HIGH and starts a timer void IRAM_ATTR buttonInput() { Serial.println("input is available !!!"); digitalWrite(led, HIGH); startTimer = true; lastTrigger = millis(); } void setup() { // Serial port for debugging purposes Serial.begin(115200); pinMode(button, INPUT_PULLUP); attachInterrupt(digitalPinToInterrupt(button), buttonInput, RISING); // Set LED to LOW pinMode(led, OUTPUT); digitalWrite(led, LOW); } void loop() { now = millis(); // Turn off the LED after the number of seconds defined in the timeSeconds variable if(startTimer && (now - lastTrigger > (timeSeconds*500))) { digitalWrite(led, LOW); startTimer = false; } }
As we have already discussed that the interrupt could be software generated (internal interrupt) or due to hardware (external interrupt). This tutorial we are using hardware or external interrupt for demonstration. You can also use software interrupts or both in a single code, as per your requirements.
Fig. 7
In this code, we are using timer to add delay instead of using delay() function.(I will also explain that why it is preferred to use timer in order to create delay instead of using delay() function after the code demonstration).
Inside the loop function which is continuously running, the buttonInput function will be called every time when an interrupt occurs , which we have defined previously inside the setup() function.
Fig 14 Serial monitor
Delay() function is a complete software process and it is mostly used because it is easier to implement delay using only software. On the other hand, when we switch to hardware delay or use a timer to add delay the process is a bit complicated to implement.
But, when we think of a practical perspective we prefer hardware delay over software delay. Because a software delay keeps the processor busy in a continuous loop and the processor need to keep all other tasks on halt.
On the other hand, if we use a timer to add delay the processor can complete some other task while the timer is playing its own part.
This concludes the tutorial. Hope you find it helpful. In our next tutorial, we will discuss the ESP32 Web Socket server.
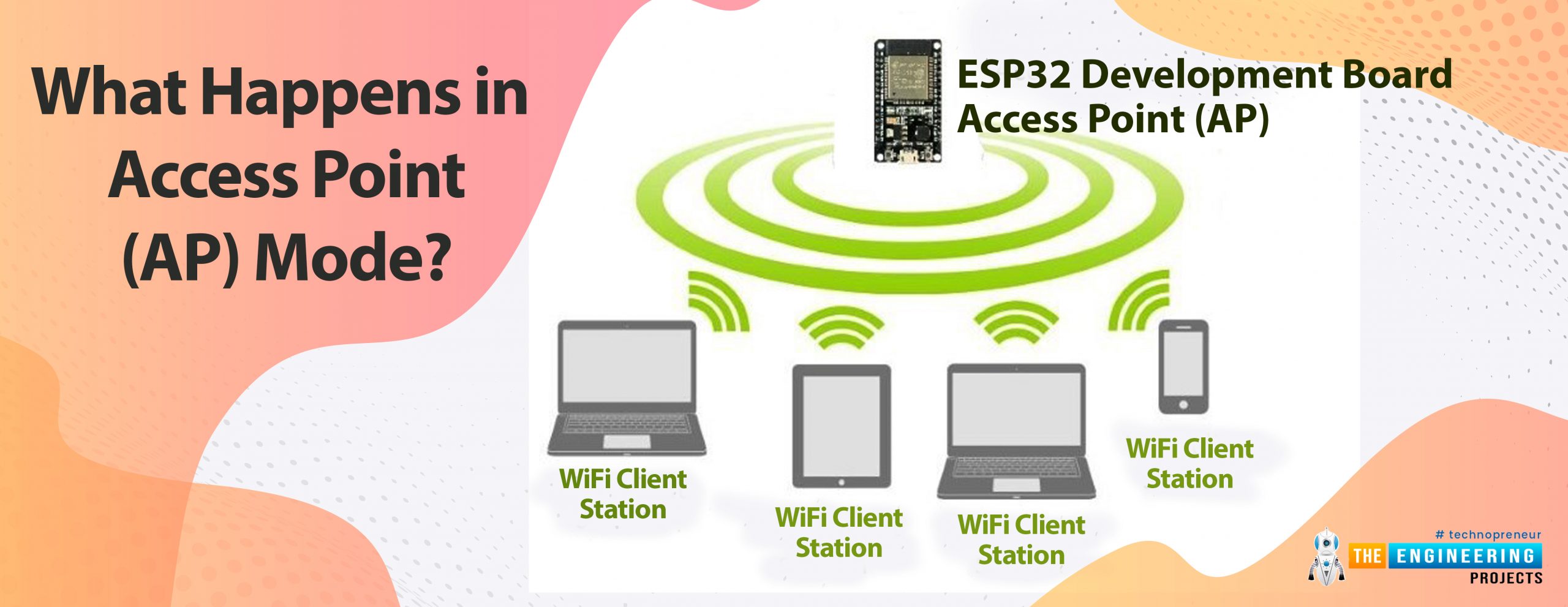
ESP32 can be operated as an access point (AP) or a Wi-Fi station (STA mode). So, in this tutorial, we will create an ESP32 web server in access point (AP) mode. Here's the video demonstration of ESP32 WebServer in Access Point Mode:
As I mentioned above, in our 2nd tutorial, we already discussed the basics of the ESP32 web server. So, in this tutorial, we will only discuss how to create the ESP32 in access point mode.
For detailed information about the basics of the ESP32 web server and how client-server communication takes place, follow our previous tutorial (i.e., Create a Web Server with ESP32).
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
In Access Point Mode the ESP32 creates its own wireless Wi-Fi network in this mode, similar to the one provided by your existing router. In access point mode, we don't need to connect the ESP2 to a Wi-Fi network. In the Wi-Fi network it creates, the ESP32 Wi-Fi board can connect up to 5 devices.
Fig 1 ESP32 as an Access Point
So, in access point mode, nearby Wi-Fi devices such as mobile phones, laptops, or a secondary ESP32 module acting as a station can connect directly to the AP (ESP32 module) without the need for an external Wi-Fi router.
On the other hand, in Station mode, the ESP32 wi-fi module connects to your Wi-Fi network through a router. The router acts as a conduit for communication between the web client and the ESP32. The Wi-Fi router provides the IP address. This IP address can be used by web clients to connect to the Web server on a local network.
To know about how to set up/operate Arduino IDE for ESP32 compilation, follow our first tutorial i.e., Introduction to ESP32 programming series.
Here we are using an inbuilt example from Arduino IDE(ESP32). You can modify the example code as per your requirements or can write your own code.
A screenshot is attached below to help you find the example code in Arduino IDE.
Fig 2 Wi-Fi access point example
The first task while writing the WiFi code is to add the required wifi header files or libraries in the code.
Here we are adding three libraries.
Fig 3: Libraries
Define the LED pin or a GPIO (for peripheral interface) which we going to control through web server. Here we are using the inbuilt LED which is internally connected with GPIO2
Give a name (SSID) to the ESP32 Access Point and set the password for security purpose ( if you wish to).
While creating a web server we also need to assign a port and usually port 80 is used for local web server.
Inside the setup function, the LED pin is initialized as an output one and then initialized the serial monitor with a baud rate of 115200.
The next task is to configure the ESP32 Wi-Fi module in access point mode. For that, here we are calling a function called WiFi.softAP. Where we are passing two parameters, ssid and password, respectively.
After configuring the AP mode, we need to fetch the IP address of the access point by calling the WiFi.softAPIP() function and printing it on the serial monitor.
Then, after fetching the IP address, we will start the server using the server. perform.
After configuring the Access Point mode and initializing the server, the server will next wait for the station or client connection, which can be a mobile phone, a laptop, or another ESP32 board configured in STA mode.
Once the connection is established between the access point and the client device, the access point will wait for the data input.
A string type variable called currentLine has been defined to hold the incoming data from the client.
If there is a byte to be read from the client, then it will be stored inside the char type variable c.
HTTP header always starts with a response code e.g.: HTTP/1.1 200 ok
An HTML page will be created on the client’s browser, from where the client device can control (ON/OFF) the LED.
Different URLs will be created to turn ON and OFF the LED depending upon the HTML input received from the client device i.e., H (to turn ON the LED) and L ( to turn OFF the LED).
Client.stop() function is responsible for closing the connection between Access Point and client or station device.
Note: If you need any guidance regarding how to upload or compile a code for the ESP32 module in Arduino IDE, follow our first tutorial on the ESP32 programming series.
Here we are going to control the ESP32’s inbuilt LED through an ESP32 web server (AP mode).
We will connect our station or client device through Wi-Fi to the ESP32 module, which (ESP32) is currently acting as an access point (AP).
To establish the connection go to your mobile phone’s Wi-Fi setting.
The Access Point is advertising itself with a pre-defined SSID so that the station devices or clients can find the AP device and can communicate with each other.
If you find a wi-fi device (AP) named ESP32_AP (or as per your SSID) connect to that after entering the assigned password.
Fig. Connected with ESP32 AP
As we are using the inbuilt LED, no external components are required.
After connecting to the access point, you can find the IP address of the AP device printed on the Serial Monitor. As shown in the image below:
Fig.: Serial Monitor
Enter the IP address in the browser. Now you can turn the LED ON or OFF using the web page as shown in the images below.
A web page with URL 192.168.4.1/H will be displayed on the browser when LED is turned ON
Fig.: URL when LED is turned ON
LED is blue color represents the inbuilt LED which is connected to GPIO_2.
Fig.: ESP32 LED ON
Another web page with URL 192.168.4.1/L will be created when the AP will receive the input to turn OFF the inbuilt LED. As shown in the image below:
Fig.: Web page displaying the LED off state.
This concludes today’s tutorial. We hope you find it helpful.
In our next tutorial, we will discuss another ESP32 feature that is BLE (Bluetooth low energy).
Hello readers, I hope you all are doing well. Welcome to the Section 2 (ESP32 Features) of the ESP32 Programming Series. ESP32 is equipped with numerous built-in features and in each chapter of this Section 2, we will explore one of these ESP32 features in detail.
In the previous Section(Section 1: ESP32 IDEs), we installed different software IDEs to program ESP32 boards. Among these IDEs, we are going to use Arduino IDE for programming ESP32. So, I hope all of your tools are configured properly and you are ready to explore the built-in features of ESP32.
Today's the 1st Chapter of Section 2, and here we will discuss How to communicate with ESP32 Bluetooth Classic from a smartphone using Arduino IDE.
Here's the video tutorial for ESP32 Bluetooth Classic:
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | ESP32 | Amazon | Buy Now | |
ESP32 is equipped with 3 wireless communication protocols:
Before going forward, let's first have a look at the basic features of BT Classic:
Bluetooth is a short-range communication(wireless) technology, used in electronic devices(i.e. mobile phones, computers, LED, headphones, speakers etc.) for wireless communication over a short distance, approximately 15m. Bluetooth operates at a 2.4GHz ISM band. Bluetooth uses low-energy radio waves for data communication between Bluetooth-enabled devices.
Now, let's design the code to communicate over ESP32 Classic BT:
We are using Arduino IDE for code compiling and uploading to the ESP32 module. I hope you have already installed ESP32 Boards in Arduino IDE. So, let's design a simple project to understand the working of ESP32 Bluetooth Classic:
First of all, we will install a "Serial BluetoothTerminal" App from the Google Play Store to communicate with the ESP32 Classic BT.
In this project, we will first enable the ESP32 Classic Bluetooth, so that we can connect it to our smartphone. After a successful connection, we will send data from our smartphone(Serial Bluetooth Terminal App) to the ESP32 Serial Terminal and vice versa.
So, let's first understand the ESP32 BT Code and then will install the Serial Bluetooth App from the Google Play Store:
Here's the complete code:
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to enable it
#endif
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin("TEP_ESP32_BT"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
}
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
Let's understand the code working:
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to enable it
#endif
BluetoothSerial SerialBT;
Initial Configurations of the project are added in the Setup() function. In our code:
void setup() {
Serial.begin(115200);
SerialBT.begin("TEP_ESP32_BT"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
}
The Loop() Function is an infinite loop and is equivalent to while(1) in normal C Language. In our code, we have placed two if checks:
If we send any data from the Serial Terminal, this data will be transmitted to the SerialBT.
If we receive any data via ESP32 Classic Bluetooth, we will print it on the Serial Terminal.
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
So, I hope you have understood the working of this ESP32 Classic Bluetooth code. Now, let's install the Serial Bluetooth Terminal App from the Google Play Store:
If we are connecting with the ESP32 BT for the first time, we need to pair it first.
It will scan the list of all the available Bluetooth devices:
[Image]
We have successfully paired the ESP32 BT with the smartphone's Bluetooth.
ESP32 BT to Smartphone - Data Testing
[Image]
[Image]
So, that's how we can communicate between ESP32 and smartphones over Classic Bluetooth. In today's lecture, we communicated simple text data to understand the working principle. In the upcoming lectures, we will send complex data(i.e. commands & sensor values) via Classic Bluetooth.
Now, let's have a look at some theoretical knowledge about Classic Bluetooth:
Fig: BLE vs Classic Bluetooth
But, a device having BT V4 (Bluetooth version 4) can discover both BLE and Classic Bluetooth devices.
Fig: Classic Bluetooth Network topology
Classic Bluetooth can operate on both point-to-point and point-to-multi-point network topology. In traditional Bluetooth, a maximum of 7 slave devices can be connected with the master Bluetooth at a time. Though, classic Bluetooth can connect with multiple nodes/slave devices at a time, but it can exchange data with only a single node at a time.
In classic Bluetooth, the piconets are not synchronized.
The clock is one of the most important aspects of Bluetooth. In a Bluetooth connection, the master device has a clock that is used to split the time on each physical channel. Clocks on all slaves in a connection are synchronized to the master clock.
Bluetooth clock synchronization is essential because the radios must agree on when to transmit. Because Bluetooth uses precise timeslots for transmissions with devices alternating, if the clocks are not synchronized, there may be issues with devices transmitting at the incorrect time.
It is defined in multiple classes:
Generally, there are two data transmission modes:
Fig. Bluetooth packet format
Enhanced data rate packet sends the Access code and header using the basic rate and this process uses GFSK (Gaussian Frequency Shift Keying). The guard gives the time to change the modulation to EDR modulation and then the synch word (64 bits), payload, and Trailer (4 bits) bits are sent using EDR (enhanced data rate) modulation.
So, that was all for today. In the next lecture, we will communicate between ESP32 and smartphones via BLE(Bluetooth Low Energy). Till then take care. Have a good day!!!
{kind=link}
{kind=link}
{kind=link}