Buy This Project
Hello friends, today I am gonna share a MATLAB project related to finance which I have named as Financial Calculations in MATLAB. As this project is the outcome of our team efforts so its not free and you can buy it quite easily for just $20 by clicking on the above button. In finance studies, there are lot of calculations are required to be done so MATLAB plays a very important role in finance calculations and showing the pattern in graphical form. In this project, I am first gonna take the Historical Stock Data from web search online so in order to run this program, your computer must have internet access. After getting the historical stock data of 7 different markets or sectors, now there's a need to convert them into same cu ...
Yesterday, I have posted a new Arduino Lilypad / Nano Library for Proteus in which we have seen how to add that library into Proteus so that you could be able to use these boards in Proteus. That was quite easy. Today I am gonna post a small project in which we will see how to use that library and produce an Arduino Lilypad simulation in Proteus. In this Arduino Lilypad simulation in Proteus, I am gonna use obviously he Arduino Lilypad board along with few LED lightsand will make them blink. Its also quite easy and you can also download the simulation and the hex file at the end of this project but I would suggest you to do it yourself so that you learn something out of it.
Before starting this project, you must have first integrated the Arduino L ...
Hello friends, few day ago I have posted a tutorial on how to do Arduino Simulation in Proteus. In that post, we have used an Arduino Library for Proteus but as this library is in its initial phases that's why currently it supports only three basic Arduino boards which are Arduino UNO, Arduino Mega2560 and Arduino Mega1280. But as we know there are numerous Arduino boards which are used these days. So, I searched a little and I came across this amazing Arduino Lilypad Library for Proteus which has the support for few other arduino boards, so I thought to share it with you guys. I have tested this library myself as always and its 100% working. I have tested it on Proteus 7 and I think it will work fine on Proteus 8 as well. As we have the support f ...
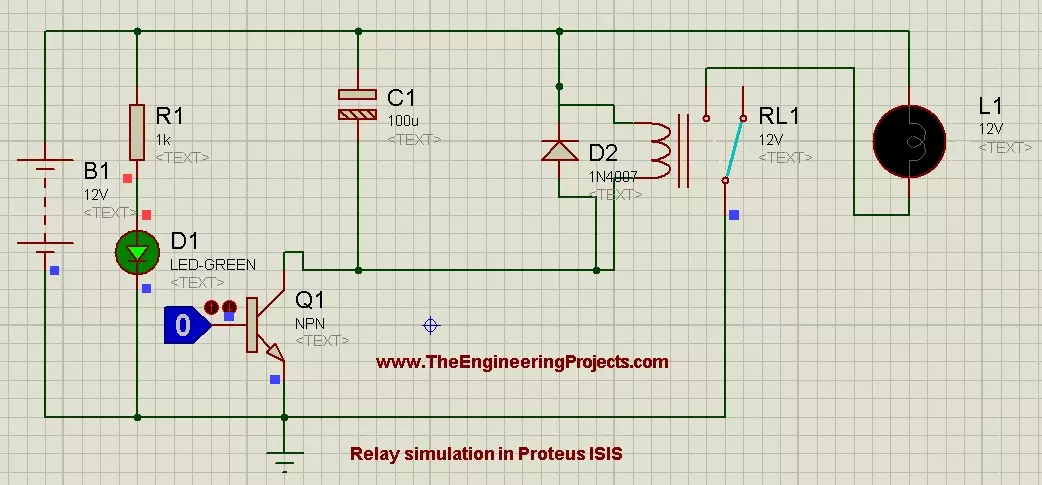
Hello friends, hope you all are fine and having fun. In the previous posts, we have discussed DC motor Control in Proteus ISIS and after that we have discussed the Stepper Motor Control in Proteus ISIS and finally we had a look at Servo Motor Control in Proteus ISIS. Now when you talk about motors control then first thing came in mind is Relay, because relay is the best way of controlling any motor. In today's post, we are gonna have a look at How to Control Relay in Proteus ISIS. Relay is a key components of any electronics or electrical circuit and is usually a problem for the engineers and students. Although, its not as difficult as it seems so I thought to post about it.
In today's post, we will first simulate the Relay in a simple circuit in ...
The Engineering Projects (TEP) deals in all kinds of programming and embedded projects related to microcontroller. Microcontroller Programming Services provided by TEP has no limits. If you have any project related to programming of microcontrollers, then sit back, relax and let us do the job for you. Microcontroller programming Services provided by TEP has a very broad field as there are lot of boards available in market. Our operator is available 24 / 7 and if someone wants to discuss their project then he/she can talk to us live via our support chat room or can also send us email.
Microcontrollers Programming is difficult because usually engineers and students doesn’t have the required tools for debugging of their codes and electronic circuits, ...
In today’s post, as the name suggests, we will see how to get data from online webserver using Arduino Wifi in simple steps. Getting data from web server using Arduino Wifi Shield has always remained a problem for the engineers. Its not much difficult task as its usually considered to be. In today’s post, I will create a small project in which I will control two simple LEDs via online web server. It’s really a very interesting project and when I completed it, I felt like Hurrah!!!
Arduino Wifi Shield is used to connect Arduino board with Wifi. After connectivity with Wifi, one can perform many tasks using this shield. We can built a complete server on it and can also use it as a client. Server designed on an Arduino Wifi Shield are usually quite si ...
Buy This Project
Hello friends, today I am going to post a complete project designed on MATLAB named as Modelling of DVB-T2 system using Consistent Channel Frequency in MATLAB. This project is designed by our team and it involved a lot of effort to bring it into existence that's why its not free but as usual I have discussed all the details below related to it, which will help you understanding it and if you want to buy it then you can click on the Buy button shown above.
This project aims to implement a DVB-T2 (Digital Video Broadcasting for terrestrial television) system using consistent channel frequency responses. Tthe code is designed to use the same output from a channel model for different transmitter configurations so that consistency of ...
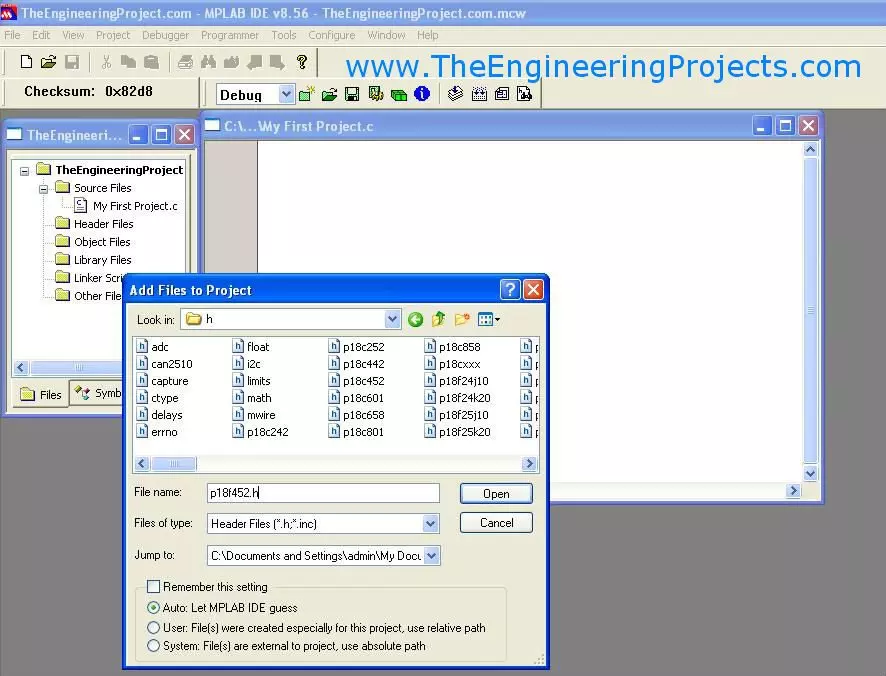
Hello friends, I hope you all are doing great. In today's tutorial, I am going to give you a detailed Introduction to MPLAB Compiler. MPLAB is used for PIC programming both in assembly and C languages. In my previous posts, I have completely explain how to install MPLAB software and also the C compiler for MPLAB.Today I am going to explain getting started with MPLAB. This chapter doesn't belong to programming but the initials required for programming. Setting a project in MPLAB is not much difficult but obviously beginners don't know much about it and they think that its a crap and very difficult. Although its not and i think its the best programming compiler for PIC Microcontroller. Easy and fully controllable. In the coming tutorial we are gonna ...
Hello friends, hope you all are fine and enjoying good health. In today's tutorial we are gonna have a look at Installation of MPLAB C Compiler in Windows. In the previous part of this chapter, I have explained How to install the MPLAB software in Windows, that part was not much tricky and we did very easily and our software was then ready to use, but as we didn't install the C compiler so we can't do C programming for PIC Microcontroller on MPLAB. We can only do assembly programming on it. Now in this post I will teach you how to install MPLAB C18 compiler so that we can do programming of PIC in C. There are many different compilers available in the market, one of them is MikroC and another famous one is CCS but they are paid compilers means you ...
No.
MPLAB Tutorials
Give Your Suggestions !!!
1.
Getting Started With Microcontrollers
2.
Getting Started with PIC Microcontrollers
3.
Functions Available in PIC18F452
4.
How to Install the MPLAB Software
5.
How to Install the MPLAB C18 Compiler
6.
Getting started With MPLAB
7.
LED Blinking Project on PIC Microcontroller
Hello friends, hope you all are fine and enjoying good health. Previously, we have seen Functions available in PIC18F452. In today's tutorial we are gonna have a look at How to install MPLAB software. Until now, we have seen only what is PIC Microcontroller and what is it capable of? Now we are gonna move a little further and will see how we can burn program into it and get it our slave. So in orde ...