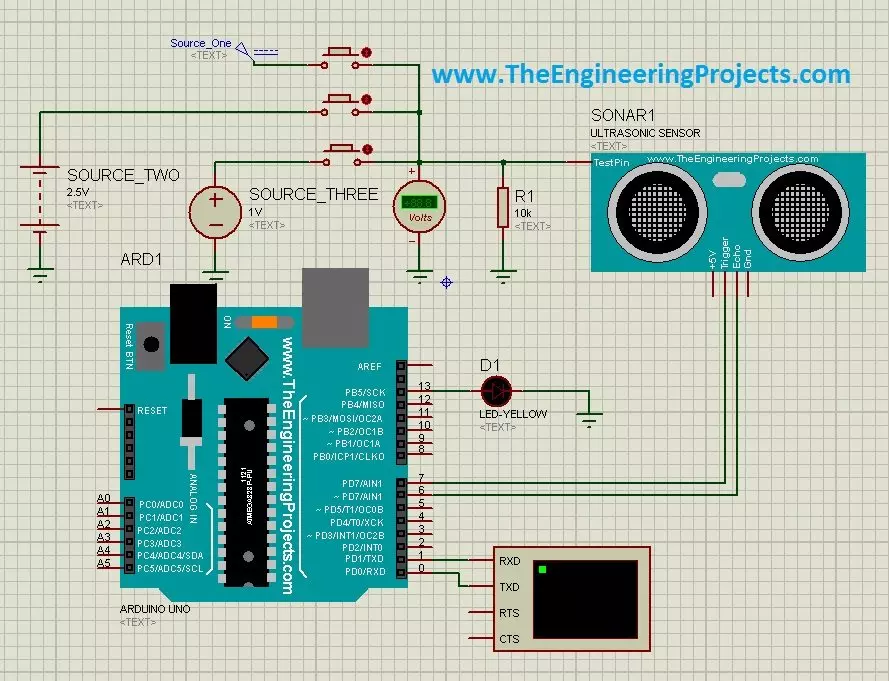
Today, we are gonna have a look on How to Interface Ultrasonic Sensor with Arduino. Few days ago, I have posted a complete tutorial on How to Use Ultrasonic Sensor Library in Proteus and later I have posted different examples on How to Simulate Ultrasonic Sensor in Proteus. Those posts were about Proteus Simulations and weren't about hardware interfacing, so I thought today let's interface it in hardware.
Simulation is a good starting point for projects but they are really far away from real world. It happened to me a lot of times that my simulations are working perfectly fine but when I design the same circuit in hardware then it says no I am not gonna work. :) So, the bottom line is never trust simulations, unless you properly test it on hardwar ...
Update: I have updated the code and removed the bug. Thanks for informing. Now this code will work perfectly.
Buy This Project
Hello friends, hope you all are fine and having good health. Today, as the name suggests, I am gonna post on how to Receive SMS with AT Commands using Sim900 and Arduino. I have already posted a tutorial on How to Send SMS with Arduino UNO and Sim900, so now we are gonna check the opposite. Sending SMS is quite easy, you just need to write some AT commands and write the message you wanna send and hit the Cntrl + Z and it will be sent. But receiving a text message on your SIM900 shield is a bit difficult because now you need to place a check when user will send a message. So, ideally whenever anyone send a message to yo ...
Hello friends, a few days ago I posted an Ultrasonic Sensor Library for Proteus, using which one can easily simulate ultrasonic sensor in Proteus. The post was highly praised by the reader and I have received quite good feedback from the followers. So, I thought of sharing some more examples related to it so that users can get a complete understanding of how to use Ultrasonic sensors in Proteus. Today, we are gonna have a look on different Ultrasonic Sensor Simulation in Proteus. If you haven't read the previous post then first have a look at it because without the installation of Ultrasonic Sensor Library in Proteus, you won't be able to use these examples. Ultrasonic Sensor is used widely in Embedded Systems.Today, I am gonna share three examples of Ultrasonic Sensor Simulation in Proteu ...
Hello friends, hope you all are fine and having good health. In today's post, I am going to share an Ultrasonic Sensor Library for Proteus. A few days ago, I posted a tutorial on Arduino Library for Proteus, and today I am going to share the new Ultrasonic Sensor Library for Proteus. Using this library, you can easily interface Ultrasonic Sensors with different Microcontrollers like Arduino, PIC Microcontroller etc.First of all, let's have a brief introduction to ultrasonic sensor. In an ultrasonic sensor, there are two nodes available, one is the transmitter while the other is the receiver. The transmitter sends an ultrasonic wave and this wave strikes any hindrance present in front of it and then bounces back. This bounced ultrasonic sensor is th ...
In the previous post Logical Gates in Ladder Logic for PLC, we had an overview of what is Ladder Logic programming and we have also implemented three basic Logical gates in Ladder Logic form. Today, we are gonna have a look at some complex Logical Gates in Ladder Logic for PLC. So, I hope till now you guys have basic knowledge of Ladder Logic and can implement complex logical gates in it. If you haven't read the previous post then must read because without that knowledge you won't understand this post.
In today's post we are gonna implement few complex logical gates. Its not gonna be much difficult if you have the basic concepts. I am just pointing out few important points here. While implementing any gate in ladder logic, always consider rung as ...
Hello everyone, I hope you all are doing great. In today's tutorial, I am going to share the detailed fIn the previous post, we have seen Introduction to PLC, which was quite simple and has the basic introduction to PLC. To day we are gonna have a look at Getting Started With Ladder Logic For PLC. Ladder Logic, also named as Ladder Logic Programming, is the programming language for PLCs. Its normally considered as the most difficult language among the engineers because of its complex structure, but if you ask me then I will say its the most interesting programming language.
Ladder Logic is different from the usual programming language of Microcontrollers like Arduino, PIC Microcontroller etc. Microcontrollers programming usually compiled from top ...
Hello friends, I hope you all are fine and enjoying good health. Today's tutorial, as the name shows, is on Introduction to PLC. PLC is an abbreviation of Programmable Logic Controller. Recently I worked on a project in which I have to design a Automated coffee Mixing Machine Using PLC. It worked quite good and I had a great time while working on it. After completing that project, it occurred to me that I haven't posted any tutorial on PLC. So I thought of starting this tutorial. This tutorial is not gonna cover in single post so my plan is to divide it in parts.
Today. I am gonna give an overview about PLC. We will have a look on basics i.e. what is PLC? Why we use PLC instead of microcontroller like Arduino or PIC Microcontroller? What's its adv ...
Hello friends, hope you all are fine and having fun. Today, I am going to share a new kind of tutorial, which is about online earning. We all know that engineering students are rich with knowledge but they are not much well with earning while studying so I have thought a bit on this issue and finally I decided to share some topics using which one can earn online quite easily. Before going into details, I wanna clear one thing that it won't be that much but still it will be enough to spend a month. So, follow all my tutorials carefully and if you follow them step by step then I am sure that you can earn big. Moreover, you should also have a look at this new Tutorial2: Earn with PrimeDice , its another great site through which you can earn BTC.
So, ...
Hello friends, today's tutorial is about Introduction to multilevel inverters, which is quite a wide field so I am not gonna discuss everything here. I will post more about it in my coming tutorials. Today, I am going to through some light on the multilevel inverter, i.e. how they operate and will also discuss their types in detail. So, let's start it.
An inverter, also named a power inverter, is an electrical power device that is used to convert direct current (DC) into alternating current (AC). Using a few control circuits and switches, one can get AC at any required voltage and frequency. Inverter plays exactly the opposite role of rectifiers as rectifiers are used for converting alternating current (AC) into direct current (DC). There are diff ...
Buy This Project
This post is the next part of our previous post Financial Calculations in MATLAB named as Implementation of Black Litterman Approach in MATLAB, so if you haven't read that then you can't understand what's going on here so, its better that you should first have a look at that post. Moreover, as this code is designed after a lot of our team effort so its not free but we have placed a very small cost of $20. So you can buy it easily by clicking on the above button.In the previous post, we have covered five steps in which we first get the financial stock data, then converted it to common currency and after that we calculated the expected returns and covariance matrix and then plot the frontiers with and without risk free rate of 3%. ...