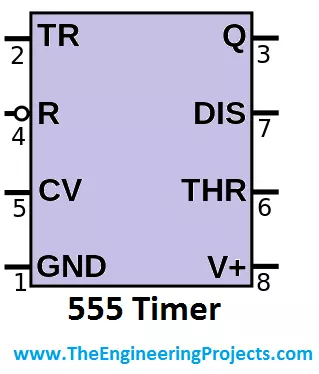
Hello friends, i hope you all are fine and enjoying. Today i am going to share a new tutorial in which I am gonna explain What is 555 timer? We all know about 555 timer, which is an 8-pin IC (integrated circuit), most commonly used in electronic projects, built now a days. As you can see fron its name that it is a timer and designed to generate PWM.
In today's tutorial i am going to explain, what's hidden inside this 555 timer IC and what is 555 timer. A 555 timer is a much compatible electronic device and the biggest feature of this IC is that it able to work on both analogue and digital techniques. Now if we simply consider the output of the 555 timer then, at any particular time, this timer has only 1 definite state. Which means at any time, it ...
Hello friends, i hope you all are fine and enjoying in life. On a friends request, today i am going to share a new tutorial which is 'Getting Started with Arduino Software'. Previously i have uploaded a large no of project tutorials made on 555 timers and some MATLAB based Simulations. Now we are going to touch the next level and from now on we will work on mostly projects containing Arduino microcontroller.
To get started with Arduino microcontroller, we first need to learn the operating software of Arduino microcontroller. This tutorial is very informative and i will be using Arduino software 1.0.5. It is a very basic level software and very easy to learn. IF you have already worked on Arduino software then you don't need to go through it. This ...
Buy This Project
Hello friends, i hope you all are fine and enjoying. In this post i am going to share a new project tutorial, in which we will see how to design an 11 Level Cascaded H Bridge Inverter. If you recall my previous tutorial, in which we saw the design and working applications of 11 Level 3-phase Capacitor Clamped Inverter, then you can see its exactly the same project but only we are having a different approch in it, instead of using Capacitor clamped we are using cascaded H bridge Inverter in this project.
In this project we again are going to design an inverter but the only difference is The Implementation Technique. In that project we used Capacitor Clamped technique to get High Voltages inverted AC and now in this project, we wi ...
Hello friends, hope you all are fine and enjoying. Today I am going to share a very interesting tutorial which is Analysis of Sinusoidal Pulse Width Modulation of AC signal. I will try to explain this tutorial in parts. I will explain the code step by step and at every step we will see that what are the purpose of commands, which are written in that particular code. Before doing that first of all let me explain what is meant by Pulse Width Modulation.
Pulse Width Modulation or PWM is a technique which is used for getting Analog Results with digital means. We can say that some Digital Control or some Electronics algorithm is used to generate square waves. Square wave is in fact a signal which is generated through switching between ON & OFF stat ...
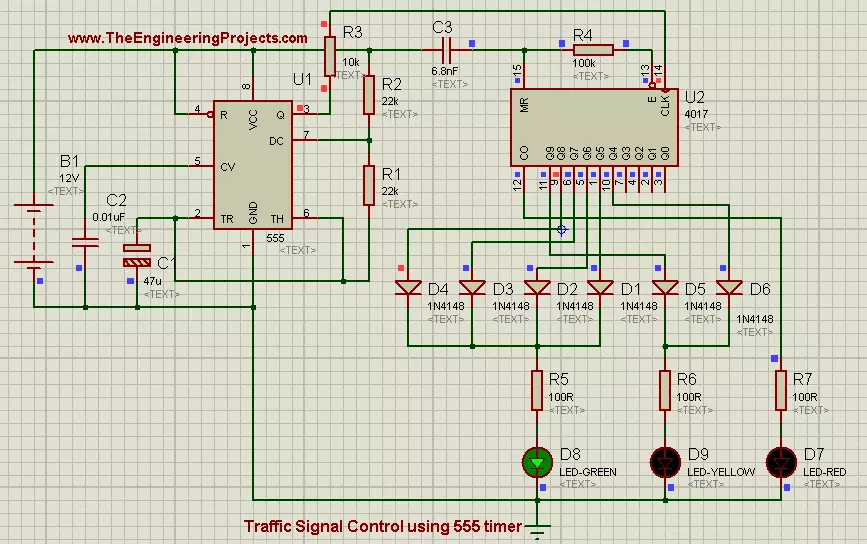
Hello Friends, i hope you all are fine and enjoying. Now i am going to share my new project tutorial which is Traffic Signal Control using 555 Timer. Up till now i have uploaded a no. of projects using 555 timer and i have got much appreciation from my friends, for some 555 timer based projects like How to use Capacitive Touch Sensor in Proteus ISIS, Sequential LED Blinking using 555 Timer and many more.
Now i am going to share another application of 555 Timer and here we will be using a shift register (4017) next to 555 timer to implement Traffic Signal Control circuit. 4017 is a SERIAL IN PARALLEL OUT shift register. Data enters in a serial manner into register and it leaves the register in parallel manner. 4017 is a 10-bit shift register and it ...
Buy This Project
Hello friends, I hope you all are fine and enjoying. Today i am going to share a new project which is Fault Detection of Gas Turbine in MATLAB. In this project, i will try to elaborate that, What is a Gas Turbine? What are the operating parameters of a Gas Turbine? Mostly what type of Faults and Vibrations comes in Gas Turbine system during its operation? Gas Turbine is also called a Combustion Turbine. It has Four Basic components which includes Compressor, Combustion Chamber, Turbine and Alternator.
Generally compressor is installed upstream and the Rotating turbine is connected downstream and the Combustion Chamber is connected in between both of them and at the end of line we have Alternator which is also connected on the sa ...
Hello friends, I hope you all are fine and enjoying life. Today i am going to share a new project tutorial which is How to create a GUI in MATLAB ? First of all, lets have a little introduction that what is meant by GUI? How it is created and what are the uses and applications of GUI? GUI stands for Graphical User Interface. We all know the basics of MATLAB that it is used for creating complex algorithms and to create Simulink simulation, but we don't know that it aalso has another feature which is to create GUIs. The algorithms developed in MATLAB works on the background and do their tasks while MATLAB also emphasis on the user interaction that's why it has also provided us with GUI so that we can create a user friendly front end interface for ou ...
Hello friends, I hope you all are fine and enjoying yourself. Today I am going to share my new project tutorial which is Relay Control Using 555 Timer in Proteus ISIS. We all know about relays that are used for automatic switching and are magnetically connected while electrically insulated. If you don't know much about relays then I think you should first read What is a Relay? in which I have given a detailed overview of relays and where are relays used? After reading this post you will have a good grip over relay and today's post will be piece of cake for you. Relays are mostly used with some microcontrollers like Arduino or PIC Microcontroller. You might also wanna have a look at traffic Signal Control using 555 Timer, which is good if you are i ...
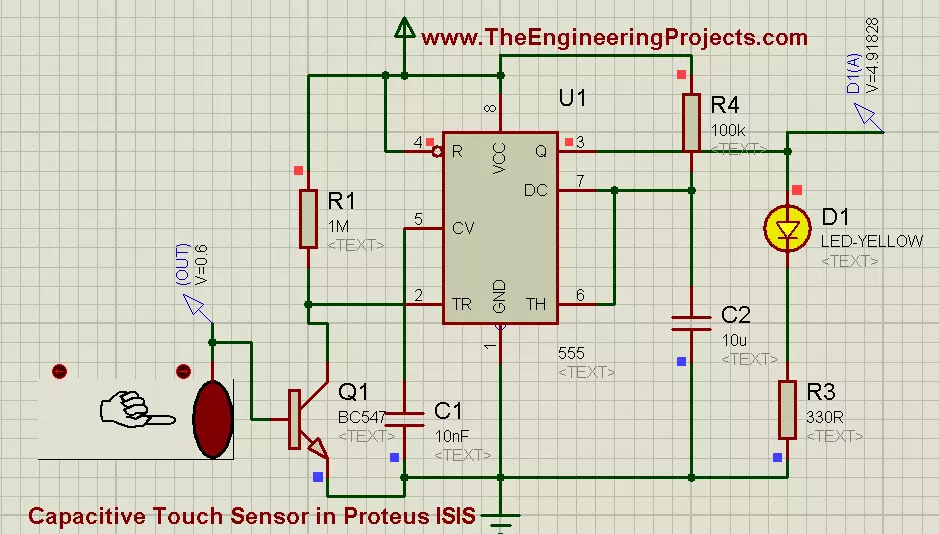
Hello friends, I hope you all are fine and enjoying. Today i am going to share my new project's tutorial which is How to use Capacitive Touch Sensor in Proteus ISIS. It is a very interesting project, and we will be using a 555 Timer while designing this project. If you recall our previous project tutorial which was Angle Control of Servo Motor using 555 Timer in Proteus ISIS, in which 555 timer was generating PWM and was controlling the rotating angle of servo motor.
Now in this project, we have a little different context and now we will be using a 555 Timer in collaboration with Capacitive Touch Sensor. First of all, lets have a little introduction of Capacitive Touch Sensor. Well, if we talk broadly then, in Electrical Engineering Capacitive Tou ...
Hello friends, hope you all are fine and enjoying. Yesterday I got a mail from a friend, and he requested me to explain a tutorial about Seven Segment Display. So today, I am going to share my new project tutorial which is Seven Segment Display using 555 Timer in Proteus ISIS. It is a very simple project to understand Modern Digital Electronics.
As you all know, now a days all the Digital Display’s uses Seven Segment Display. So first of all let’s have a little introduction about Seven Segment Display. How they are fabricated and how their LED’s glow in such a beautiful manner? Seven Segment Display (SSD) is the form of electronic device, used to display decimal numbers. Seven Segment Displays are commonly designed in Hexagonal shape but according ...