Hello friends, hope you all are fine. In today's project, we are gonna design Electronic Quiz Project with 8051 Microcontroller. I have done this project recently in which we need to design a quiz project game using 8051 Microcontroller. It was quite a big project and we have to work quite hard to make it done. In this project we have used many components on which I have already post tutorials so that you guys first get introduction to those components. So, first of all you should read Interfacing of LCD with 8051 Microcontroller, after that you must check Interfacing of Keypad with 8051 Microcontroller and finally get your hands on Serial communication with 8051 Microcontroller. These tutorial are must to read because these are all gonna use in t ...
Update: We have created a new version of this library, which you can check here: Arduino Mega 2560 Library for Proteus V2.0.
Hello friends, hope you all are fine. In today's post, I am going to share Arduino Mega 2560 Library for Proteus. In the previous post, I have shared the Arduino UNO Library for Proteus and I have mentioned that I am gonna share more Arduino Libraries soon. Actually these days I am quite excited about this Proteus component designing and I am designing the Arduino boards as a starter. So, till now I have designed two Arduino boards in Proteus. First one was Arduino UNO which I have provided for download in previous post and today, I am going to share Arduino Mega 2560 Library for Proteus.
In the coming posts, I am gonna sh ...
Update: Here are the latest versions of this library: Arduino Library for Proteus(V3.0) and Arduino UNO Library for Proteus(V2.0).
]Hello friends, hope you all are fine. In today's post, I am going to share the Arduino UNO Library for Proteus. I designed this library by myself in Proteus, it was quite difficult and literally, it took me weeks to figure out How to add functionality of a new component in Proteus. First, I used Proteus VSM but it was quite difficult so I left it and finally, I used Microsoft Visual Studio C++ Language to design this Arduino library for Proteus.
I am not going to discuss How I designed this library because it's quite a lengthy process and I will discuss it some other time. Today, I will provide the Arduino UNO library for Proteus to download, so that you ...
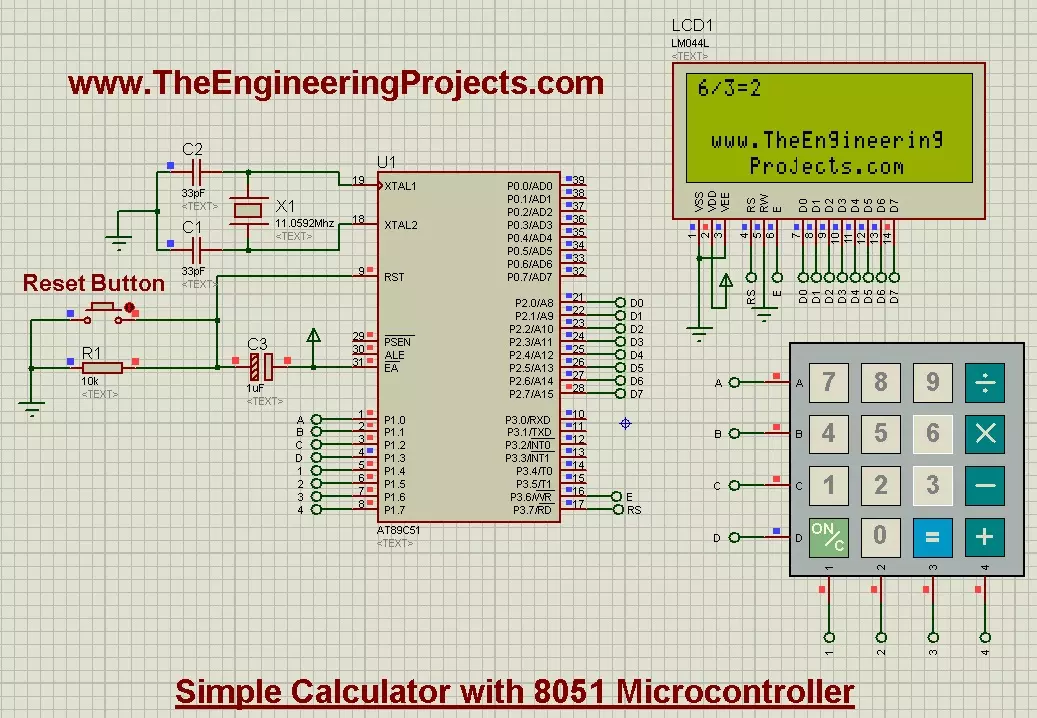
Hello friends, today's post is about designing a simple calculator with 8051 Microcontroller. In our previous post, we have seen How to Interface keypad with 8051 Microcontroller in Proteus ISIS. Moreover, we have also worked on Interfacing of LCD with 8051 Microcontroller in Proteus ISIS. If you haven't read these two posts then my suggestion is to read them first before going into the details of this post, as we are going to use both keypad and LCD in order to design the simple calculator with 8051 Microcontroller.
Actually we have already understood the working of both keypad and LCD so I thought to share this small project as it will give you the practical application of both keypad and LCD. And if you are new to 8051 Microcontroller then its ...
Hello friends, in today's post we are gonna have a look at Interfacing of Keypad with 8051 Microcontroller in Proteus ISIS. In the previous project, we have seen the Interfacing of LCD with 8051 Microcontroller and I have told there that LCD is a great debugging tool as we can print our data on it and can display different values and that's what is gonna done in today's post. Today, I will get the values from keypad and then question is how to know that we are getting the correct values. So in order to do so, we will display these values over LCD. So, that's how we are gonna use LCD as a debugging tool. As the debugging is concerned, there's another great tool for debugging which is called Serial port, we can also display these values over to Seri ...
Hello friends, hope you all are fine and having fun with your lives. Today's post is about Interfacing of LCD with 8051 Microcontroller. In my previous post, we have seen How to do Serial Communication with 8051 Microcontroller, which was quite a basic tutorial and doesn't need much hardware attached to it. Now today we are gonna have a look at Interfacing of LCD with 8051 Microcontroller. LCD is always the basic step towards learning embedded as it serves as a great debugging tool for engineering projects.
LCD is also used almost in every Engineering Project for displaying different values. For example, if you have used the ATM machine, which you must have, then you have seen an LCD there displaying the options to select. Obviously that's quite a ...
Hello friends, hope you are having fun. In today's post, we will have a look at Serial Communication with 8051 Microcontroller in Proteus ISIS. In the previous post, we have seen a detailed post on LED Blinking Project using 8051 Microcontroller in Proteus ISIS, which was quite a simple tutorial. And I hope if you are new to 8051 Microcontroller then from that post you must have got some idea about C Programming of 8051 Microcontroller.
Now, today we are gonna go a little further and will have a look at Serial Communication with 8051 Microcontroller and we will also design the simulation of this project in Proteus ISIS software. 8051 Microcontroller also supports Serial port similar to Arduino and PIC Microcontroller. And the communication protoco ...
Hello friends, hope you all are fine and having fun with your lives. In today's tutorial, we will see LED Blinking Project Using 8051 Microcontroller. I haven't yet posted any project or tutorial on 8051 Microcontroller. I have posted quite a lot of tutorials on Arduino and PIC Microcontroller, so today I thought of posting tutorials on 8051 Microcontroller. Its my first tutorial on it and I am gonna post quite a lot of tutorials on 8051 Microcontroller in coming week.
So, as its our first tutorial on 8051 Microcontroller that's why its quite a simple one and as we did in Arduino we will first of all have a look at LED Blinking Project Using 8051 Microcontroller. In this project, we will design a basic circuit for 8051 Microcontroller which invol ...
Buy This Project
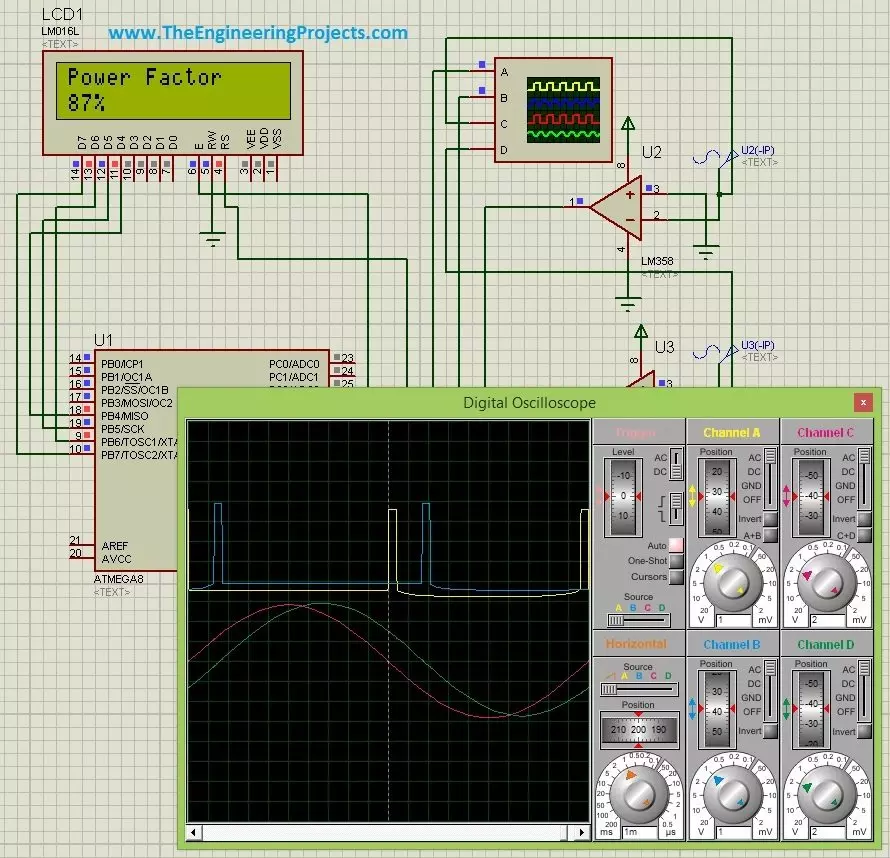
Hello friends, hope you all are fine and having fun. Today's post is about Power Factor Measurement using Microcontroller in Proteus ISIS. As usual, I have this project simulation in which I have to simulate a power factor measuring project using atmega microcontroller. So, I use atmega8 microcontroller and the used Proteus ISIS as the simulating software. Power Factor Measurement isn't that difficult but its a quite tricky and in today's post we are gonna cover it in full detail.
There are many ways for power factor measurement and today's the method we are gonna use is called zero crossing detection. We will first detect the zero crossing of our signal and then we are gonna do the power factor measurement based on the detectio ...
Buy This Simulation
Hello friends, Hope you all are fine and having fun with your lives. In today's post, I am going to show How to display a Scrolling Text on LED Matrix 8x8 using Arduino in Proteus ISIS. We all know about LED Matrix but if you don't know then google it. :P LED Matrix is used to display long messages, the best thing about LED Matrix is you can combine then in serial way and can make it of any size you want. Like in this post I have combined 8 LED matrices and then displayed my message on them. I have given all the details here but as you can see we have done a great effort in designing this simulation so I haven't posted it free but have placed a very small amount of $20 on it and you can buy it quite easily from our shop by cl ...