Hello friends, hope you all are fine and having fun in your lives. Today, I am going to share Top 3 PIC C Compiler. We all know about PIC Microcontrollers because of which now we can quite easily add complex automation in our projects. So, today, I am going to share C compilers for PIC Microcontrollers. When an engineer starts working on some engineering project then he must have to choose a microcontroller. PIC is most commonly used Microcontroller in engineering projects. So, now when you have selected that you are gonna use PIC Microcontroller in your project then there comes a need which compiler to use for designing programming code for PIC Microcontroller.
It's quite a difficult as well as important decision because I have seen that once you ...
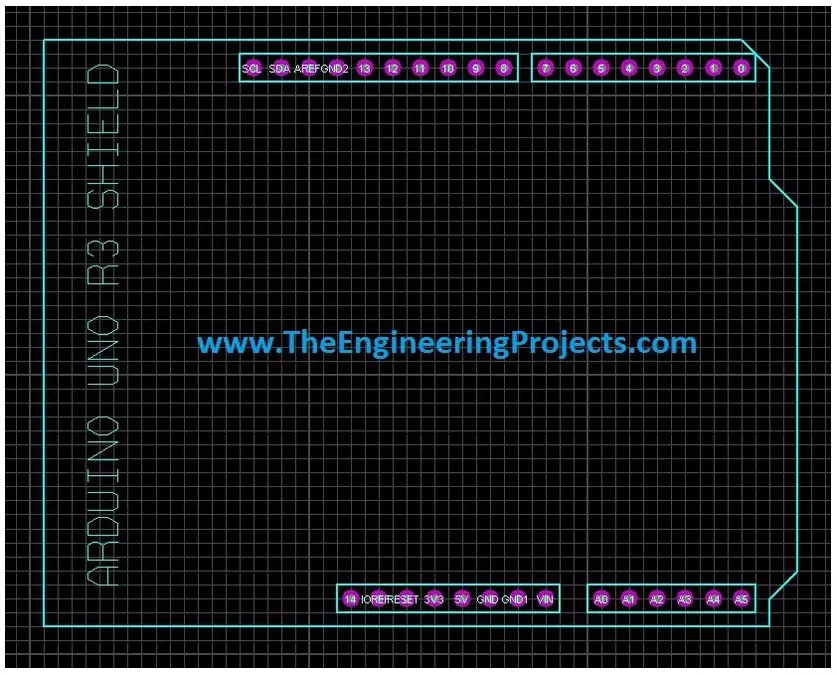
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share an informational tutorial about top 10 PCB design Software. These PCB design software are used for designing PCBs. In all engineering projects especially related to electronics, PCB designing is an important task and in order to design the PCB we have to use some software. There are many software available in market and today, I am gonna give a complete list of PCB Design software.
Few of these software and free to use and few have limited versions available but in order to get their advanced features you have to buy them. I have also mentioned their features below. If you have read my blog in detail then must have the idea that I use Proteus software f ...
Hello friends, hope you all are fine and having fun with your lives. In today's post, I am gonna design a Convolution Calculator in MATLAB. We all know about convolution but if you don't know then here's the wiki page for convolution which has a detailed description of Convolution. In simple words, convolution is a mathematical operation, which applies on two values say f and g and gives a third value as an output say v. In convolution, we do point to point multiplication of input functions and gets our output function.
Convolution is an important technique and is used in many simulating projects. It has a vital importance in image processing. So, today we are gonna do convolution in MATLAB and will check the output. You should also check Image Zo ...
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to combine all of my MATLAB Projects in this post. I have posted quite a lot of projects on MATLAB but they are not well arranged that's why are not easily accessible. So, today I finally thought to combine all my MATLAB Projects and post their links in this post so that you guys can easily access all of them in one place just like Arduino , PIC Microcontroller Projects. All these MATLAB Projects and tutorials are designed and written by our team and we have done quite a lot of work in compiling these projects as you all know MATLAB is the most difficult and vast educational tool.
Most of these MATLAB Projects are free to use and users can easily download their ...
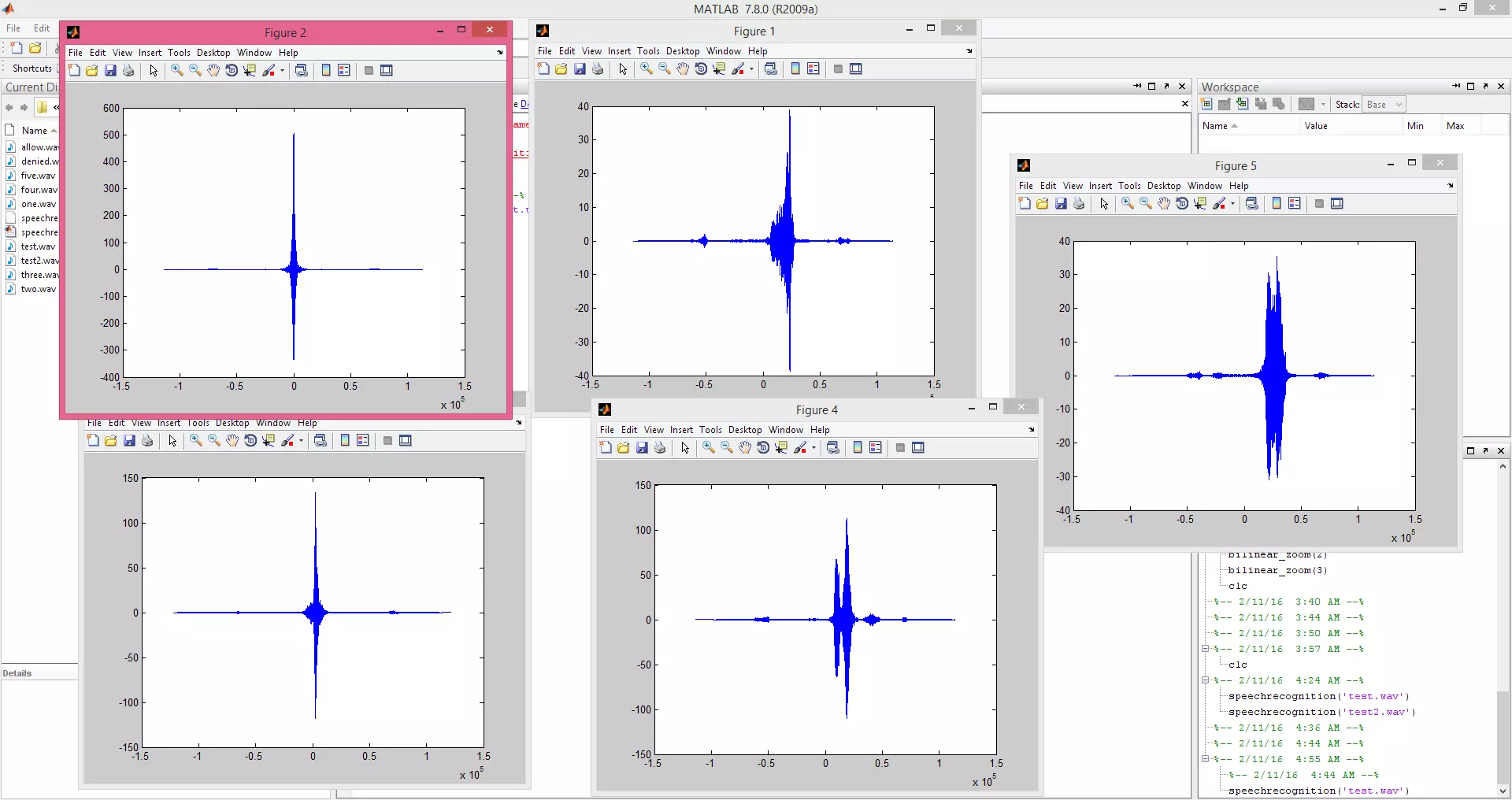
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share a tutorial on Speech Recognition in MATLAB using Correlation. Speech recognition is used in almost every security project where you need to speak and tell your password to a computer and is also used for automation. For example, I want to turn my AC on or off using voice commands then I have to use Speech Recognition. I have to make the system recognize that whether I am saying ON or OFF. In short, speech recognition plays a vital role in voice control projects. In today's post, I am gonna show you How to do Speech Recognition in Matlab and the technique I have used in this project is known as cross correlation. You should also have a look at Eye Ball D ...
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share a simple tutorial on Image zooming with bilinear Interpolation in MATLAB. We have seen many software in which there's an option of zooming an image. For example, if you have used paint or photoshop then you have seen that you can zoom your image quite easily by clicking a button. Today's we are gonna do the same thing but in MATLAB and we will have a look at the code behind this feature.
Now, when we are zooming some image then in fact we are increasing the pixels of that image and in order to do that we have to fill those extra pixels with the color of their neighbor pixel. This thing is know as interpolation. There are many different techniques for in ...
Hello Friends, hope you all are fine and having fun. In today tutorial i am going to elaborate How to Automatically Connect with Wifi SSID using Arduino YUN. If you recall one of my previous tutorials named Getting started with Arduino YUN , in which i gave a brief introduction about Arduino YUN, its working and features. In that tutorial, I have explained How to connect Arduino YUN with Wifi manually. A little problem encounters while connecting Arduino manually to available wifi networks that if wifi connection drops then, then Arduino will also disconnect automatically and if wifi connection is energized again, it will still remain disconnected unless you reconnect it by yourself. This thing has very serious drawbacks in industrial projects, wh ...
Hello friends, hope you all are fine and having fun with your lives. Today I am gonna post 555 Timer projects list which are already posted on our blog. Actually, I have posted many 555 Timer Projects on my blog but we don't have a list of these tutorials and they are quite scattered. So, today I thought to arrange them in a proper list so that you can find all of them in one place. All these 555 timer projects are simulated in my favorite simulating software Proteus. I have also given their simulations for download in almost all tutorials. If you feel problem in any of them then ask in comments and I will resolve them.
All these 555 Timer Projects and tutorials are written and designed completely by our team so we hold the complete ownership for ...
Hello everyone, hope you all are fine and having fun with your lives. In today's post, I am going to share How to generate PWM in 8051 Microcontroller. PWM is an abbreviation of Pulse Width Modulation and is used in many engineering projects. It is used in those engineering projects where you want an analog output. For example, you want to control the speed of your DC motor then you need a PWM pulse. Using PWM signal you can move your motor at any speed from 0 to its max speed. Similarly suppose you wanna dim your LED light, again you are gonna use PWM pulse. So, in short, it has numerous uses. If you are working on Arduino then you should read How to use Arduino PWM Pins.
PWM, as the name suggests, is simply a pulse width modulation. We take a pu ...
Hello friends, hope you all are fine and having fun with your lives. In today's post, I am going to share Interrupt based Digital clock with 8051 Microcontroller. In the previous post, I have explained in detail How to use Timer Interrupt in 8051 Microcontroller. We have seen in that post that we can use two timers in 8051 Microcontroller which are Timer0 and Timer1. Using these timers we can easily generate interrupts. So, before going into details of this post, you must read that timer post as I am gonna use these timer interrupts in today's post.
After reading this post, you will also get the skilled hand on timer interrupt and can understand them more easily. In today's post, I am gonna design a digital clock which will increment after every o ...