Hello friends, I hope you all are fine and having fun with your lives. Today, I am going to share a new Home Automation Project using XBee & Arduino. Home Automation Project is a most commonly designed project by the engineering students. So, that's why I have thought to create a complete Home Automation Project so that engineering students can get benefit out of it.
We all know about automation which is originated from automate or automatic. In automation the task is done automatically and you don't need to control it. In normal Home automation project, there are few sensors which are displayed wirelessly to user and there are few controls like user can ON or OFF Lights, Fans etc via remote or mobile App.
In this Project, I have used Arduino ...
Hello friends, I hope you all are fine and having fun with your lives. Today, I am going to share a new tutorial which is Interfacing of Flame Sensor with Arduino. I have recently posted a tutorial in which I have shared the Flame Sensor Library for Proteus. Now in this tutorial, I am gonna use that Flame Sensor Library and will interface this Flame Sensor with Arduino. So, if you haven't downloaded this file then I suggest you to download this Flame Sensor Library so that you can easily simulate this flame Sensor in Proteus.
I am sharing interfacing of this Flame Sensor with Arduino today, but soon I will also post a tutorial on Interfacing of Flame Sensor with PIC Microcontroller. If you guys have any questions then ask in comments. I have also ...
Hello friends, I hope you all are fine and having fun with your lives. In today's tutorial, I am going to share a new Flame Sensor Library for Proteus. This Flame Sensor is not available in Proteus and its library is not yet developed anywhere. We are the first ones designing this new Flame Sensor Library for the first time. I am quite excited while sharing it as it's our team efforts that we are able to design new Proteus Libraries which are helpful for students.
We are planning to share more sensor libraries this week. I hope you guys are going to enjoy them and share them with your friends so that they can also know about them. Other bloggers are warmly welcome to share this library on their blogs but do mention our blog link in it as a favor. ...
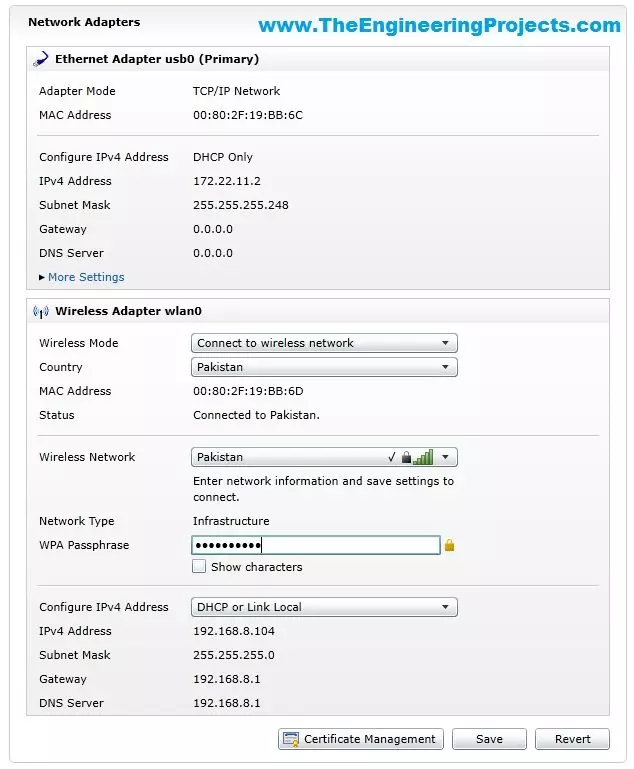
Hello friends, hope you all are fine and having fun with your lives. In today's tutorial, I am gonna show you How to Configure NI MyRio on Wifi. In our previous tutorial, Getting Started with NI MyRio I have show you how to get started with NI MyRio and control LEDs of NI MyRio but you have seen that we have done that over USB. In simple words, we have controlled the LEDs and gyroscope of MyRio over USB but in today's tutorial, first of all, we are gonna configure NI MyRio on Wifi and then we are gonna control all those things over Wifi instead of USB.
If you have a project on MyRio then its my recommendation to use Wifi instead of USB for upload and testing your codes because Wifi is quite flexible in use and you no more restricted to use the USB ...
Hello friends, I hope you all are fine and having fun with your lives. Today, I am going to show you Color Detection in MATLAB Live Video. In this project I am gonna take a live video feed from a camera and then will detect a specific color in that video feed. I have posted a project before in which I have done the same Color Detection in Images using MATLAB but that color detection was for images but in today's post I am gonna do the color detection in MATLAB for live video feed.
I have designed this project in MATLAB 2009 and have also tested it on MATLAB 2015 and it works fine. So, I think it will work on any version of MATLAB. You must have the image processing toolbox in your MATLAB. If you got any questions then ask in comments and I will t ...
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share a new project which is Motion Detection in MATLAB. In this project, I am gonna detect the motion in MATLAB. This project was designed for security purposes and the condition was to use MATLAB instead of PIR Sensor. We all know that PIR sensor is used for motion detection but for that we have to design a hardware but using this software we can easily detect any motion using MATLAB.
In this project, I have used the webcam and then applied a simple image processing algorithm, designed in MATLAB. Using this algorithm I have detected the motion in the environment. That's a quite simple project and you are gonna like this one. The code and complete simulation ...
Hello fiends, hope you all are fine and having fun with your lives. In today's tutorial, I am going to share a new project designed in MATLAB and named as Hexapod Simulation in MATLAB. We all know about the Hexapod, its a special kind of robot which has six legs. Hexa is used for six so its quite obvious that hexapod has six legs on it.
I have designed this project on a client's request and today I thought to share it with you guys. Because this Hexapod simulation in MATLAB is designed after a lot of efforts by our TEP team that's why this simulation is not free to download but we have placed a small price on it so that engineering students can buy it easily. So, let's get started with Hexapod Simulation in MATLAB.
Hexapod Simulation in MATLAB
...
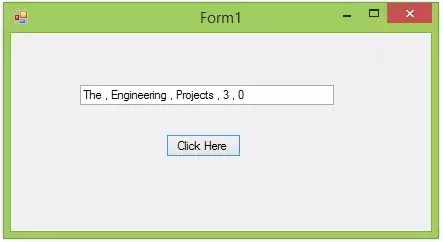
Hello friends, I hope you all are fine and having fun with your lives. In today's post, we are gonna have a look at How to use C# ArrayList. I am gonna explain it in detail what is C# ArrayList and how to use C# ArrayList. But before going into the details of today's tutorial, you must first have a look at my previous tutorial which is How to use C# Array??? because C# ArrayList is quite similar to C# Array.
I am gonna use the same project which we have designed in our first lecture on C# named as Introduction to C# Windows Forms. So, you should also use the same project and as we know this project has one Button and one Text box. Just a recall that I have changed the Text of the button to Click Here and the name of the button to ClickHere. Simila ...
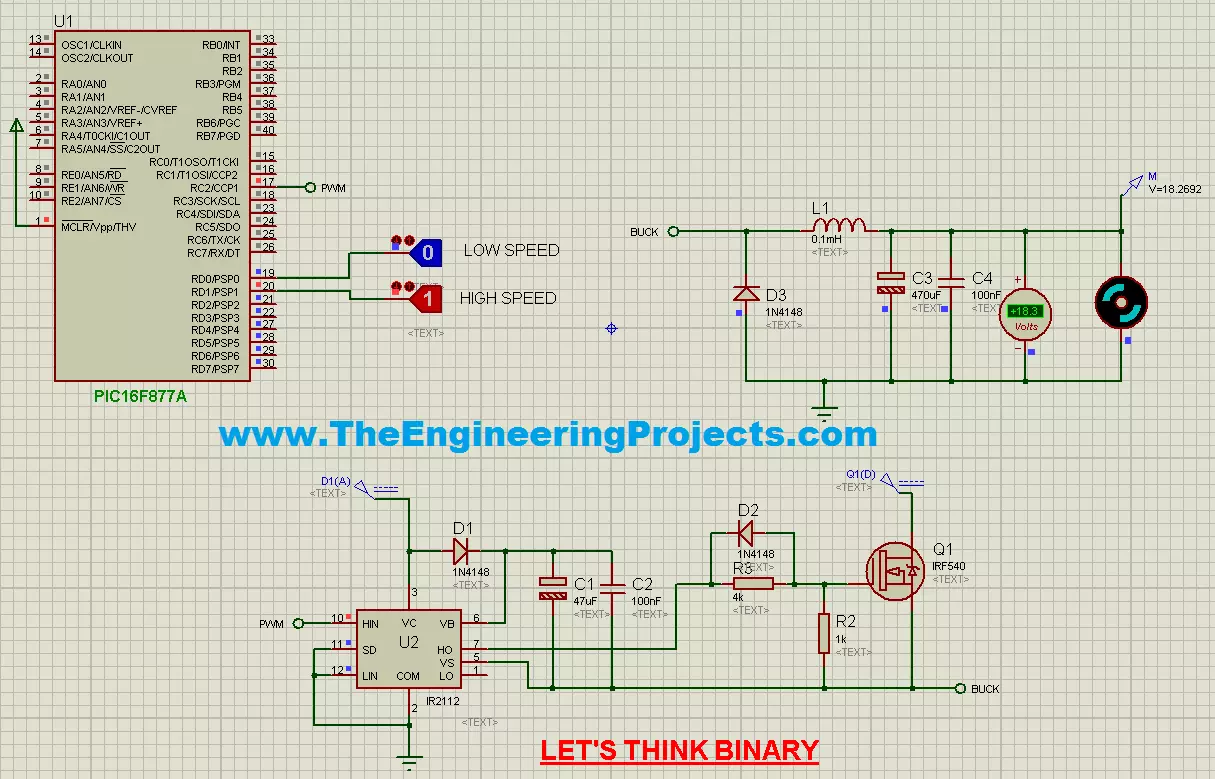
Hello friends, hope you all are fine and having fun with your lives. Today's tutorial is about speed control of DC Motor using PIC Microcontroller. I haven't written this tutorial by myself. Instead this tutorial is written by one of my very good friend Salah Dahouathi. We had an interaction through his awesome Facebook group Let's Think Binary and I would suggest you guys to join it as well, because he posted many projects in his group. So, after having a look at his work, I asked him to write for our blog which he gladly accepted and here's his first post. :) I hope you guys are gonna enjoy this one and will get knowledge out of it. So let's get started with this speed control of DC Motor using PIC Microcontroller tutorial.
Many applications in ...
Hello friends, I hope you all are fine and having fun with your lives. Today, I am going to share a tutorial on new board and as you can see in the title, this new board is named as Myrio. So, today, we are gonna have a look at getting started with Myrio. NI myRIO is a combination of dual-core ARM Cortex™-A9 real-time processing and Xilinx FPGA customizable I/O. It is specially designed for engineering students by National Instruments and is a cheap as well as an awesome piece for building your dream projects.
Recently I got a chance to work on this NI Myrio board and I really enjoyed while working on them as they not only awesome but also easy in programming. Moreover, because of its awesome speed you can ask it to do any kind of embedded work. Y ...