Hi friends and hope you are doing very well. Today we would like to take one tutorial which is very essential in the industry which is analog input processing for handling analog measurements of physical signals like temperature, humidity, pressure, distance, flow and level of liquids, etc. Typically, sensors produce two types of analog signals to represent the equivalent measured signal which is current and voltage signals. The currently produced signals would be within the range of 4-20 mAwhile voltage signals are in the range of 0-10 v. because, that output signals represent physical signals, the limits of output signals are 0 to 10 v for voltage based sensors and 4 to 20 mA for current-based sensors, these values should be scaled to represent ...
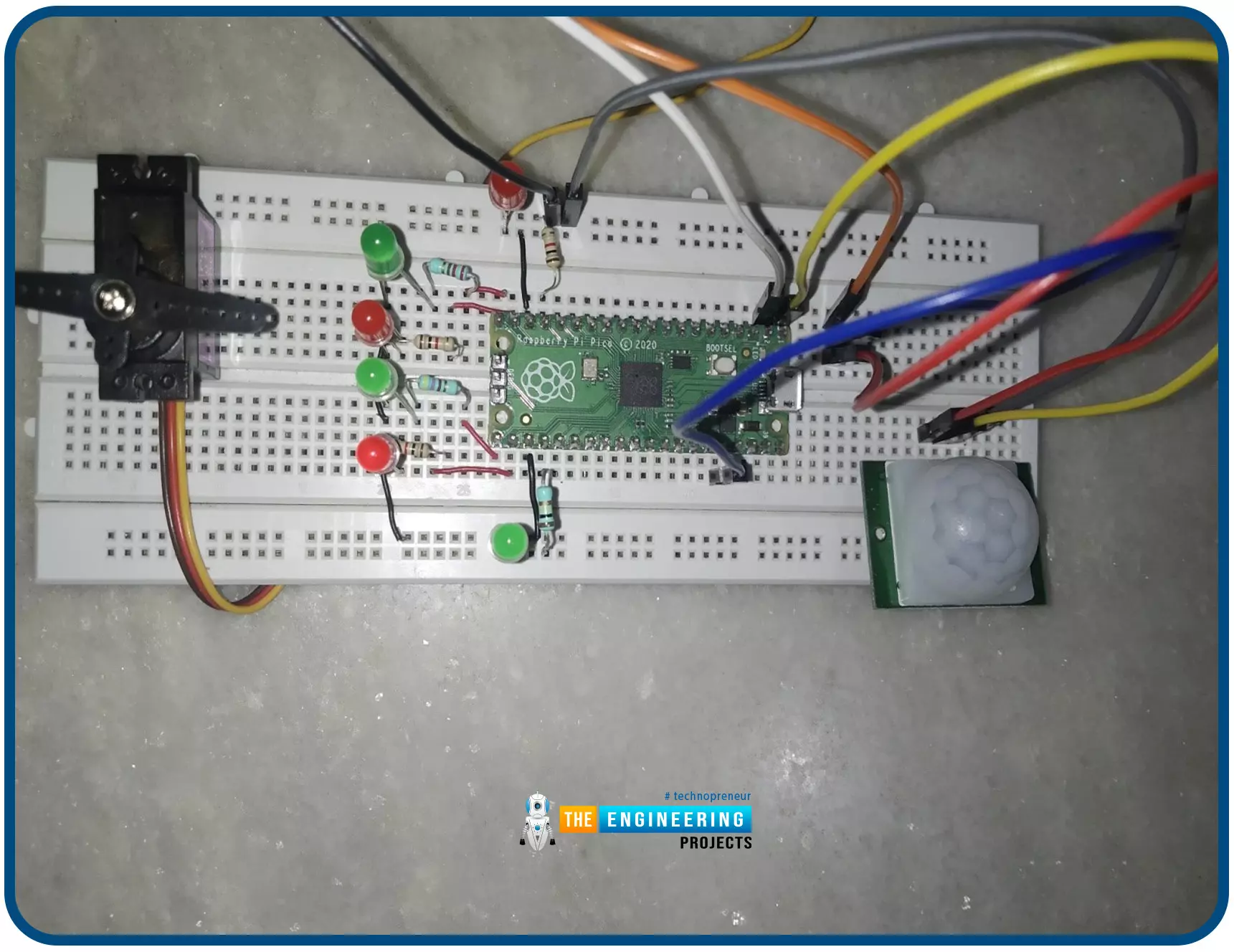
Hello readers, I hope you all are doing great. In this tutorial, we will learn how to interface the PIR sensor to detect motion with the Raspberry Pi Pico module and MicroPython programming language. Later in this tutorial, we will also discuss the interrupts and how to generate an external interrupt with a PIR sensor.
Before interfacing and programming, the PIR and Pico boards let’s first have a look at the quick introduction to the PIR sensor and its working.
Fig. 1 Raspberry Pi Pico and PIR sensor
PIR motion sensor and its working
PIR stands for Passive Infrared sensors and the PIR module we are using is HC-SR501. As the name suggests the PIR or passive infrared sensor, produces TTL (transistor transistor logic) output (that is either HIGHT o ...
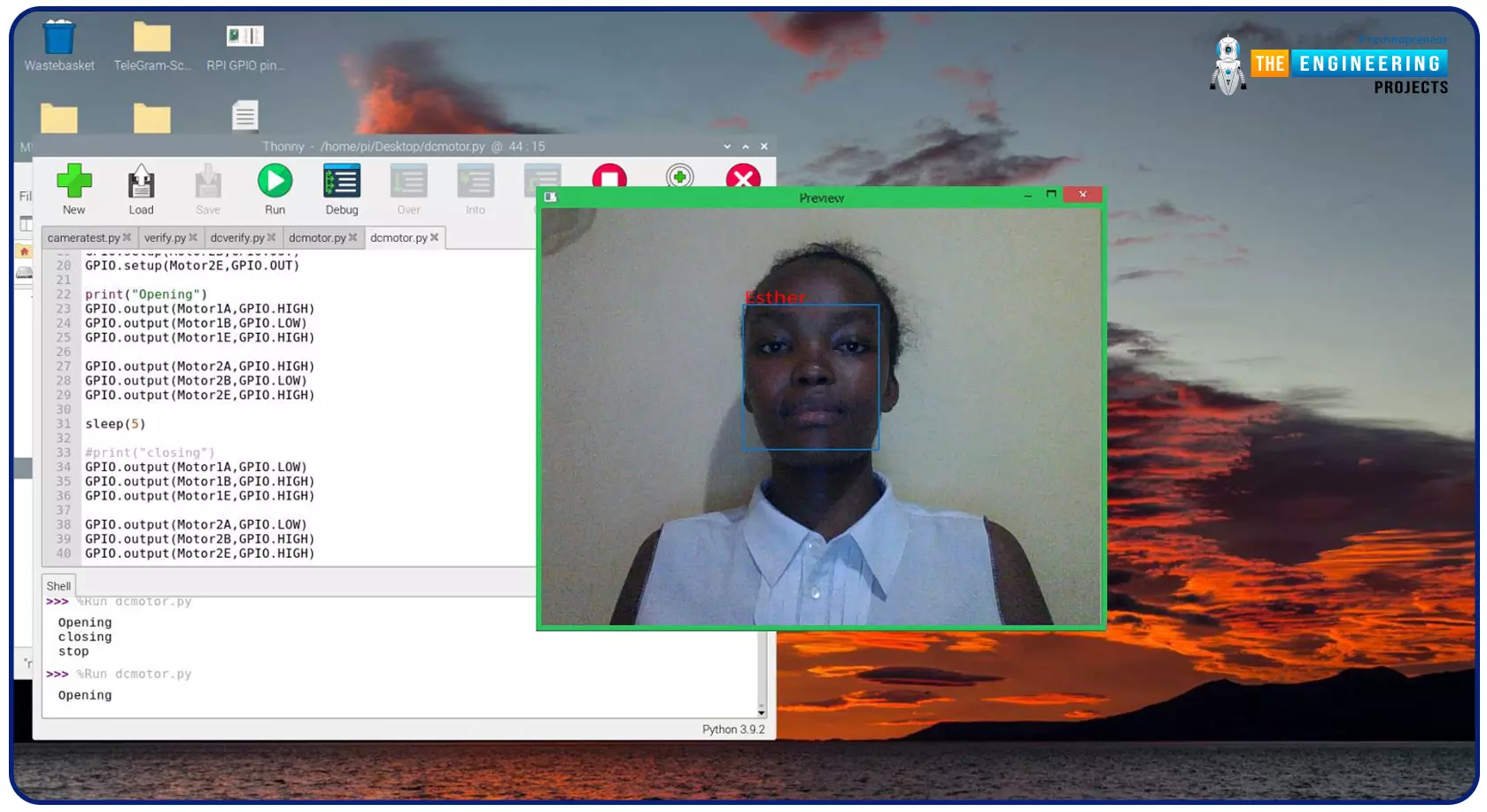
Greeting, and welcome to the next tutorial of our raspberry programming tutorial. In the previous tutorial, we learned how to build a smart attendance system using an RFID card reader, which we used to sign in students in attendance in a class. When it comes to building a face-recognition program on a Raspberry Pi, this tutorial will show you how. Two Python programs will be used in the lesson, one of which is a Training program that analyzes a collection of photographs of a certain individual and generates a dataset. (YML File). The Recognizer application uses the YML script to detect a face and afterward utters the person's name when the face is detected.
Components
Raspberry Pi
Breadboard
L293 or SN755410 motor driver chip
Jumper wir ...
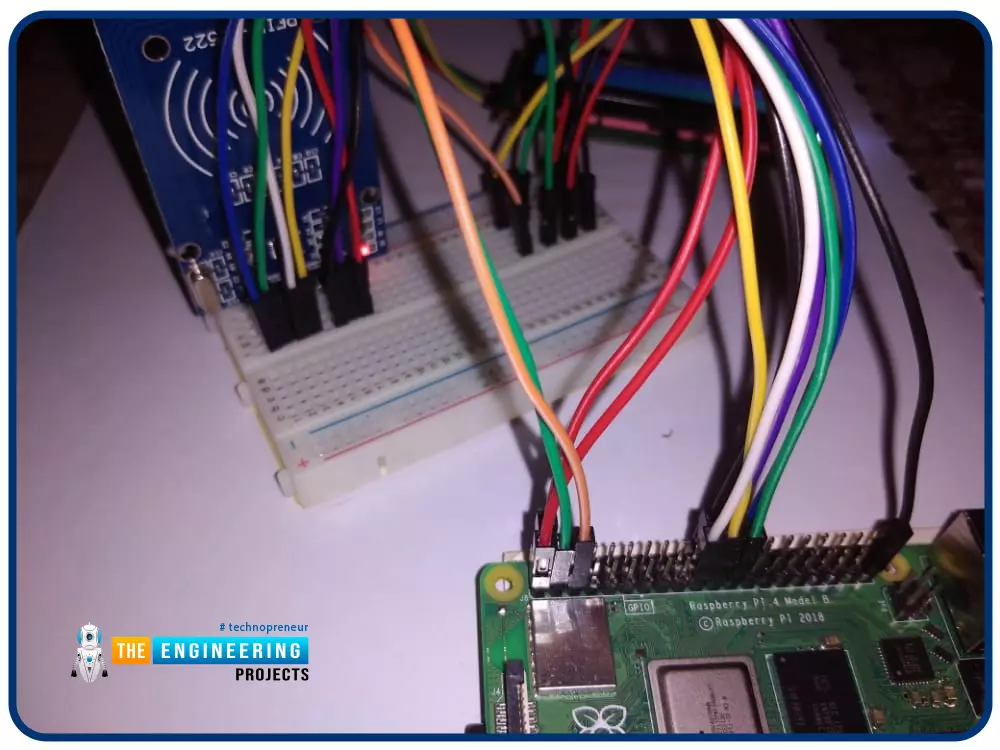
Greetings! This is the complete project of our Raspberry Pi 4 tutorials. In our previous tutorial, we learned to set up our raspberry pi as a virtual private network server. In this tutorial, we will design a smart attendance system using an RFID card reader, which we will use to sign in students in attendance in a class.
First, we will design a database for our website, then we will design the RFID circuit for scanning the student cards and displaying present students on the webpage, and finally, we will design the website that we will use to display the attendees of a class.
Components
RFID card kit
Breadboard
Jumper wires
Raspberry pi 4
I2C LCD screen
Design a database in MySQL server
Additionally, the Database server offers a DBMS ...
Hello friends, in the previous tutorial we learned about ions and now I am coming up with a new article Molecular ion. In this article, we will discuss the formation of molecular ions. When we discuss molecular ions many types of questions arise in our minds. I hope after reading this article you can answer these questions which are given below:
What are molecular ions?
How many types of molecular ions?
How molecular ions are formed?
Why is NH4 + not a molecular ion? Give a reason.
Which type of molecular ions structure exists etc.?
Which example is suitable for molecular ions or not?
Discovery
In 1794, molecules were considered a minute particles according to the French. Latin used vogue words for molecules until the late 18th cent ...
Hello readers, I hope you all are enjoying our Raspberry Pi Pico programming series. In our previous tutorials, we learned how to access Raspberry Pi Pico’s GPIO pins for both input as well as output operations. For demonstration, we used LED as an output component and a push button as an input component.
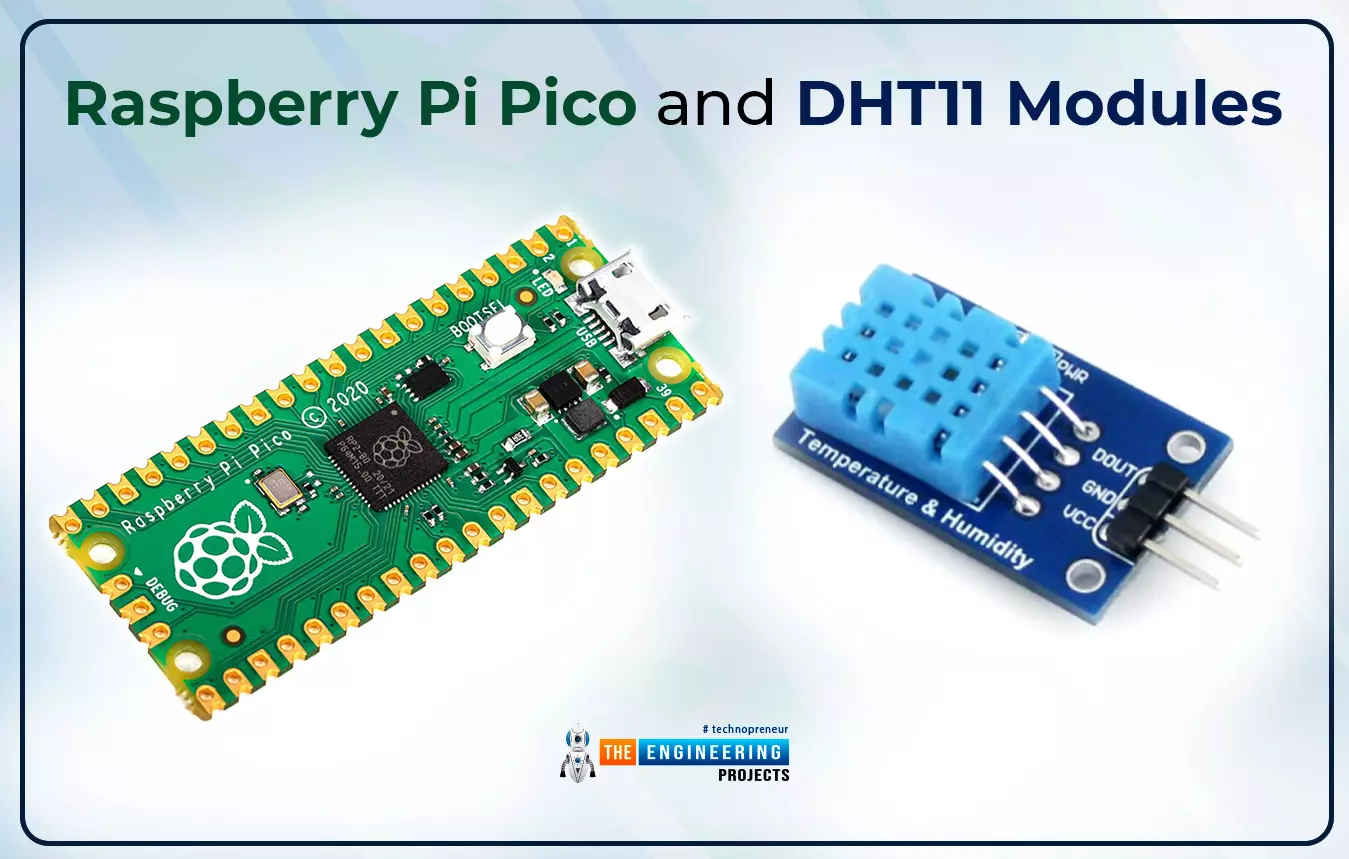
Now let’s learn how to interface sensor modules with the Raspberry Pi Pico module. So, in this tutorial, we will learn how to interface the DHT11 sensor with the Raspberry Pi Pico module and fetch the observed data (from its surrounding) using the MicroPython programming language.
Before writing the code for interfacing and fetching the data from the respective sensor, let’s first have a look at the working operation, features and properties of the DHT sensor.
...
Hello, students here in our previous tutorial we study molecules and now I am with a new topic “Ion” which might be possible for some of my readers this article seems to be new, and some of my readers may be familiar with this term. But no matter whether we know or not, in my article I try to cover all aspects of this term. Many questions arise in your mind such as you may think;
What is an ion?
How ions are formed?
What are the different types of an ion?
What methodology is utilized for assigning charge to an ion?
What are examples of an ion?
Which methods are used for the creation of an ion?
If my readers want to know the answers to these questions, hold copies and pencils in your hand and stick to my article till the end.
Brief description of an Ion
What is an ion?
Definition
...
Hello, friends today we will discuss the basic concept of chemistry it is our first tutorial series in which we will discuss:
Atom
Molecule
Ion
Molecular ion
Now in this article, we will discuss atoms. Its definitions, examples, properties, its evolutionary history, and also some important facts in the form of questions.
Atom
Definitions
A tiny particle that cannot be seen with a naked eye so-called atom.
Or
Atom is the lowest unit of matter and is often divided without the discharge of electrically charged particles.
Or
Atom is the introductory structure block of chemistry.
Examples
From molecule;
Hydrogen (H2)
It has two atoms.
Nitrogen (N3)
It has three atoms
From elements;
Helium(He)
It has two electron
Properties
We discuss different properties of atoms ...
Hello readers, I hope your all are doing great. We know that a Raspberry Pi Pico module comes with multiple inbuilt features for example onboard memory, processing units, GPIOs or General Purpose Input Outputs (used to control and receive inputs from various electronic peripherals) etc.
In our previous tutorials, we discussed how to access GPIO pins of the Raspberry Pi Pico module for both input as well as output operations.
In this tutorial, we are going to discuss another important feature of the Raspberry Pi Pico module (RP2040) which is Dual Core Processor. The Pico board features with 133MHz ARM Cortex-M0+, Dual Core Processor. This dual-core feature makes the Pico module capable of multiple thread execution or multithreading.
Now before writing the MicroPython program let’s first un ...
The Industry 4.0 market size will reach $267.01 billion by 2026. Industry 4.0 depends on the secure, fast, and cost-effective data transfer between IoT devices. IoTA is designed to ensure secure communication between two devices within the IoT(internet of things) framework. Let's have a detailed look at the role of IoTA in industrial IoT.
Understanding IoTA- how it's different from blockchain
The terms MIOTA and IoTA together make up the term IoTA. While MIOTA is a cryptocurrency, IoTA is a non-profit foundation. Since its inception in 2015, IoTA has formed joint ventures with firms like
Fujitsu
Samsung
Telekom
Volkswagen
IoTA is technically different from blockchain in terms of the underlying technology. IoTA works on a technology ca ...