Hello friends, hope you all are fine. Today, I am going to share a new Bluetooth Library for Proteus. Using this Library, now you can quite easily use Bluetooth modules in Proteus ISIS. I have designed two Bluetooth modules which are HC-05 and HC-06. We all know about these modules. We use these modules for sending data through Bluetooth. Till now, there's no such Bluetooth Library designed for Proteus and we are the first developers of this awesome Bluetooth Library for Proteus. I hope you guys are gonna like it. I have also posted a tutorial in which I have done Arduino Bluetooth Communication using HC05 in hardware. I hope that one will also be interesting to read, if you have planned to start working on Bluetooth Module.
Other bloggers are wel ...
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share a new project in which we are gonna do Arduino Bluetooth communication. The Bluetooth module I have used for this project is HC-05, which is a serial Bluetooth module. We can quite easily perform the Bluetooth communication with this module using Arduino board. I have worked on many projects in which I have to send the data from sensors to my computer via Bluetooth. So, in such projects I normally use this Bluetooth module which is connected with the sensors and then Arduino gets the data from these sensors and then send this data to computer via Bluetooth module. In this project, I have used Arduino board but you can use PIC Microcontroller or 8051 Mic ...
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share an informational tutorial about top 10 PCB design Software. These PCB design software are used for designing PCBs. In all engineering projects especially related to electronics, PCB designing is an important task and in order to design the PCB we have to use some software. There are many software available in market and today, I am gonna give a complete list of PCB Design software.
Few of these software and free to use and few have limited versions available but in order to get their advanced features you have to buy them. I have also mentioned their features below. If you have read my blog in detail then must have the idea that I use Proteus software f ...
Hello Friends, hope you all are fine and having fun. In today tutorial i am going to elaborate How to Automatically Connect with Wifi SSID using Arduino YUN. If you recall one of my previous tutorials named Getting started with Arduino YUN , in which i gave a brief introduction about Arduino YUN, its working and features. In that tutorial, I have explained How to connect Arduino YUN with Wifi manually. A little problem encounters while connecting Arduino manually to available wifi networks that if wifi connection drops then, then Arduino will also disconnect automatically and if wifi connection is energized again, it will still remain disconnected unless you reconnect it by yourself. This thing has very serious drawbacks in industrial projects, wh ...
Hello friends, hope you all are fine and having fun with your lives. Today I am gonna post 555 Timer projects list which are already posted on our blog. Actually, I have posted many 555 Timer Projects on my blog but we don't have a list of these tutorials and they are quite scattered. So, today I thought to arrange them in a proper list so that you can find all of them in one place. All these 555 timer projects are simulated in my favorite simulating software Proteus. I have also given their simulations for download in almost all tutorials. If you feel problem in any of them then ask in comments and I will resolve them.
All these 555 Timer Projects and tutorials are written and designed completely by our team so we hold the complete ownership for ...
Hello everyone, hope you all are fine and having fun with your lives. In today's post, I am going to share How to generate PWM in 8051 Microcontroller. PWM is an abbreviation of Pulse Width Modulation and is used in many engineering projects. It is used in those engineering projects where you want an analog output. For example, you want to control the speed of your DC motor then you need a PWM pulse. Using PWM signal you can move your motor at any speed from 0 to its max speed. Similarly suppose you wanna dim your LED light, again you are gonna use PWM pulse. So, in short, it has numerous uses. If you are working on Arduino then you should read How to use Arduino PWM Pins.
PWM, as the name suggests, is simply a pulse width modulation. We take a pu ...
Hello friends, hope you all are fine and having fun with your lives. In today's post, I am going to share Interrupt based Digital clock with 8051 Microcontroller. In the previous post, I have explained in detail How to use Timer Interrupt in 8051 Microcontroller. We have seen in that post that we can use two timers in 8051 Microcontroller which are Timer0 and Timer1. Using these timers we can easily generate interrupts. So, before going into details of this post, you must read that timer post as I am gonna use these timer interrupts in today's post.
After reading this post, you will also get the skilled hand on timer interrupt and can understand them more easily. In today's post, I am gonna design a digital clock which will increment after every o ...
Hello friends, hope you all are fine and having fun with your lives.In today's post, we are gonna see How to use timer interrupt in 8051 Microcontroller.8051 Microcontroller comes with timer as well. They normally have two timer in them named as Timer0 and Timer1. These timers are used for counting purposes like you want to start some countdown in your project then you can use these timers or you wanna create some clock then in that case as well you need timers. So, in short there are numerous uses of timers in a project. Timers are also used for delays like you wanna create some delay of 10 sec but you dont wanna use the delay function in your project so you can use timers. You start the timer and then when it comes to 10 seconds then you can do ...
Hello everyone, hope you all are fine and having fun with your lives. Today, I am going to share 8051 Microcontroller Projects. Recently, I have shared quite a lot of tutorials on 8051 Microcontroller which are not much arranged as a whole. So, today, I thought to arrange all those tutorials and place them here so that you can get all of them quite easily. I will upload more 8051 Microcontroller Projects and I am gonna add their links in this post so stay subscribed to this post if you are interested in learning 8051 Microcontroller.
8051 Microcontroller, as we all know, is another Microcontroller series just like PIC Microcontroller or Arduino etc. The benefit of 8051 Microcontrollers is that they are quite cheap and easily available so if you ar ...
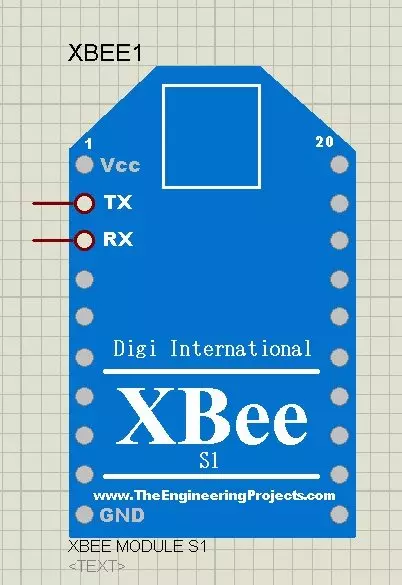
Hello everyone, today I am going to share a new XBee Library for Proteus. I am quite excited while sharing it as we are the first developer for this XBee Library. Now you can quite easily use XBee module in your Proteus software using this XBee Library for Proteus.Wehave spent quite a lot of time in developing this and that's the reason I couldn't share new tutorials in the past few days. Anyways we are done with this new exciting XBee Library for Proteus, hope you are gonna enjoy this one. I have already sharede two libraried for Proteus which are Arduino Library for Proteus and GPS Library for Proteus. You can also interface this XBee module with Microcontrollers like Arduino, PIC Microcontroller and 8051 Microcontroller quite easily.
As its the ...