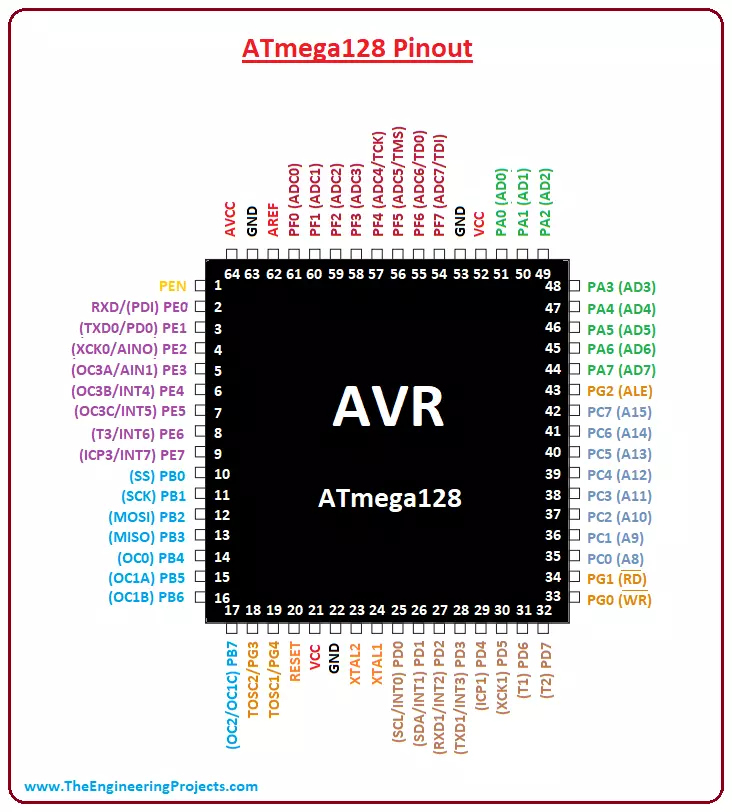
Hey Guys! Hope you are doing well. I am back to feed you with valuable information relating to engineering and technology. Today, I'll uncover the details on the Introduction to ATmega128. It is an AVR, 8-bit low power microcontroller, that comes with a 64-pin interface and is based on RISC architecture. Availability of 133 Powerful Instructions with single clock cycle and 32 x 8 General Purpose Working Registers make this device an ideal choice for many applications where decent code execution is required.
The memory space incorporates on this module is more than normal AVR controllers including Program memory around 128K, enough to store the number of instructions on a single chip.
In this post, I'll try to cover each and everything related t ...
Hi Friends! Hope you are doing well. I am back to give you a daily dose of useful information so you can excel and improve as per your technical needs and requirements. Today, I'll uncover the details on the Introduction to ATmega8. It is an 8-bit AVR microcontroller that is based on RISC CMOS technology and comes with a 28-pin interface for the PDIP package. The Program memory is 8K Flash while RAM and EEPROM are 1K and 512 bytes respectively.
Microchip has been the main source for producing PIC and AVR microcontrollers that are mainly used in embedded and industrial automation systems. These modules can perform a number of functions on a tiny chip, preventing you from spending too much and purchasing external components for laying out automation ...
Hi Friends! Hope you are doing well. We always strive to give you valuable information as per your needs and requirements so you keep coming back for what we have to offer. Today, I'll uncover the details on the Introduction to ATmega168. It is an 8-bit AVR microcontroller that comes with 32-pin interface and is mainly based on RISC CMOS technology. The Program memory is 16K, based on Flash, and incorporates read-write capabilities.
The module comes with a wide temperature range from -40 to 85 ºC while operating voltage ranges from 1.8 to 5.5 V. If you are working on project that is related to automation and embedded systems, you can not write off the importance of this module that comes with an ability of performing a number of functions at once ...
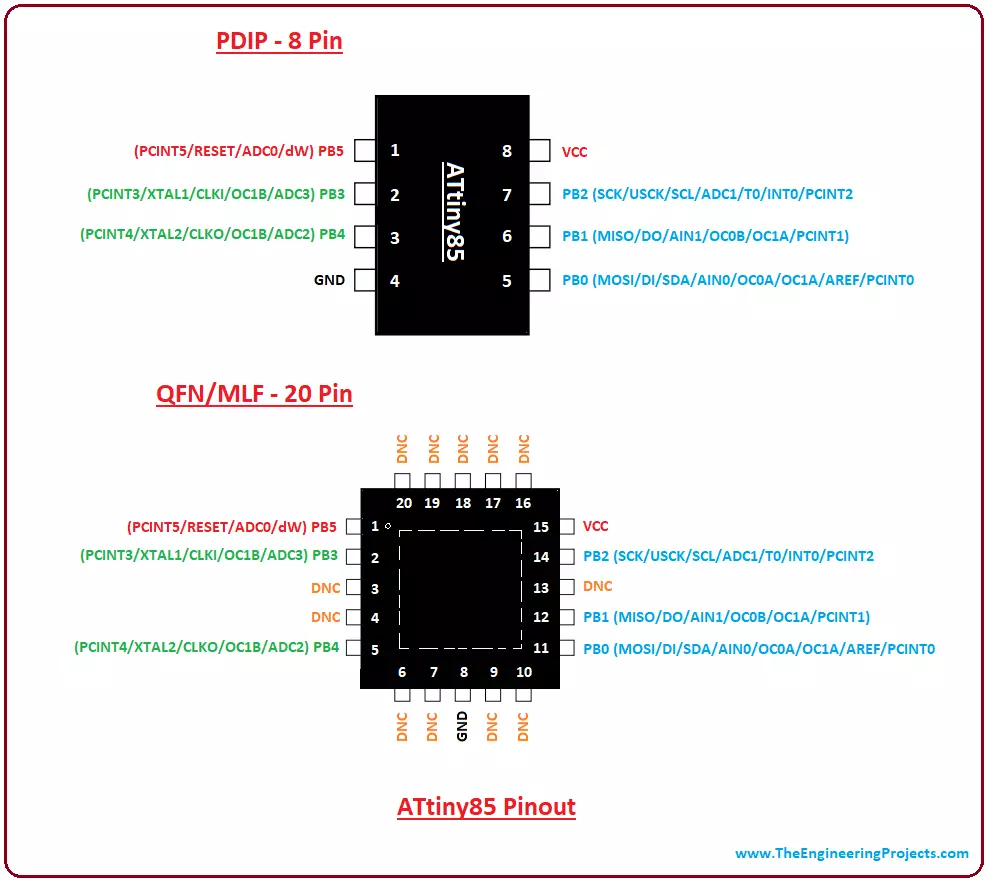
Hey Guys! Hope you are doing well. I am back to give you a daily dose of valuable information. Today, I'll discuss the details on the Introduction to ATtiny85. It is an 8-bit AVR microcontroller, introduced by Microchip, and is based on RISC CPU. It comes with 8-pin interface (PDIP) and falls under the category of low power controllers. Programmable watchdog timer and 10-bit ADC converter are added in the device that makes it suitable for sensor interfacing and resetting the device in case it gets stuck in an infinite loop.
Microchip never fails to satisfy the requirements of any individual by providing flawless microcontroller modules that are directly or remotely connected with automation and embedded systems. With the invention of these tiny o ...
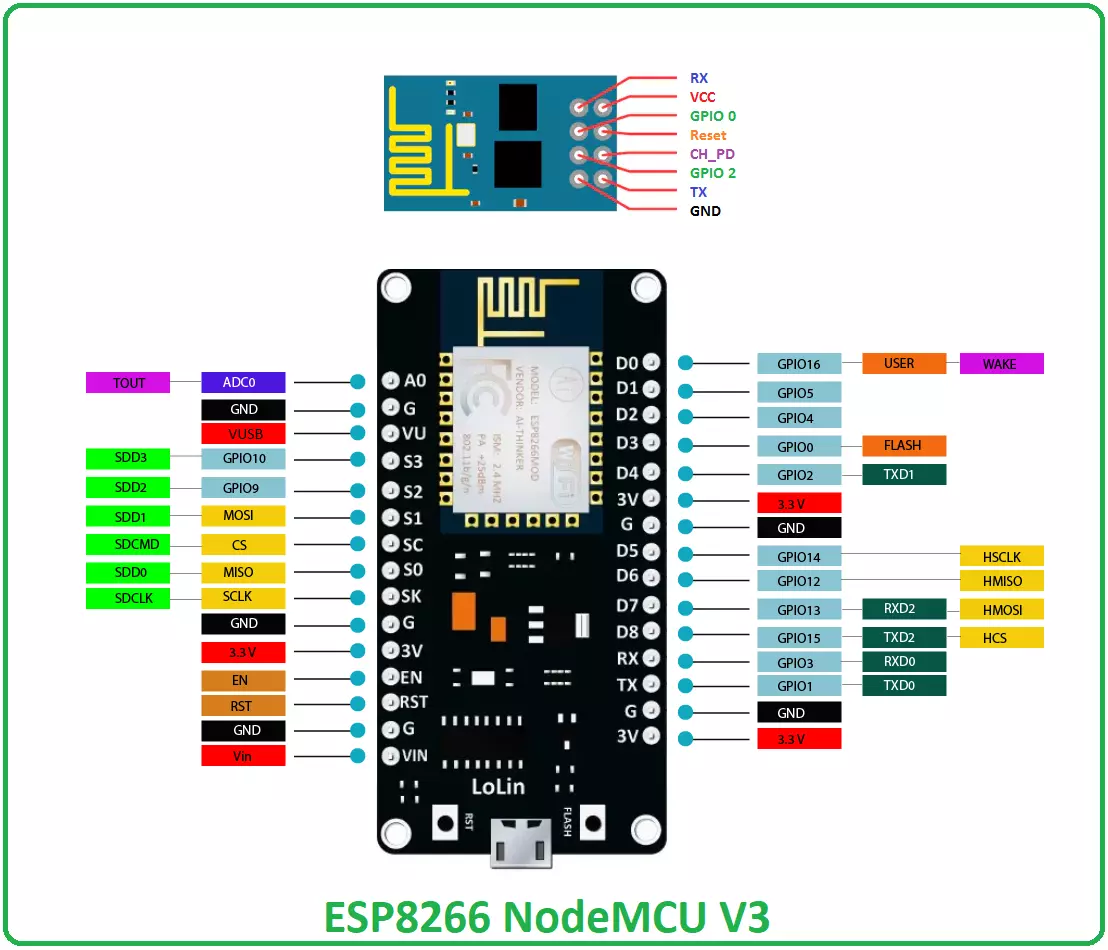
Hello friends! Hope you are doing well. Today, we will have a look at the detailed Introduction to ESP8266 WiFi module. ESP8266 is a very low-cost & user-friendly WiFi module, which develops a simple TCP/IP connection and can easily be interfaced with microcontrollers via Serial Port. The first chip in this series was ESP-01 which gained sheer attention in the market.
In this tutorial, we will discuss the ESP8266 WiFi module along with its pinout, features, specifications, applications and datasheet. Let's dive in and nail down everything related to this device.
ESP8266 WiFi Module
ESP8266 (also called ESP8266 Wireless Transceiver) is a cost-effective, easy-to-operate, compact-sized & low-powered WiFi module, designed by Espressif Systems, that supports both TCP/IP and Ser ...
Hello friends, I hope you all are doing great. In today's tutorial, I am going to share a new Rain Sensor Library for Proteus. I have got a lot of requests for designing this sensor. So finally it has been designed by our team and is ready to use in your Proteus Simulations.
Rain Sensor, as the name shows, is used for detection of rain and is common sensor used in Embedded Systems Projects. Both analog and digital rain sensors are available these days but we have only designed the digital Rain Sensor. It will give digital output and its output will be HIGH when there's rain and will remain LOW if it won't detect any rain.
As Proteus is a simulation software and we can't actually bring the rain so that's why I have placed a TestPin. If you apply H ...
Hi Guys! Hope you are doing well. We always strive to give the most relevant information as per your needs and demands. Today, I'll discuss the details on the Introduction to RJ45. It is a type of standard connector mainly used for data transmission.
Almost all ethernet cables come with this connector on each end, and they, sometimes, known as RJ cables. The RJ in the connector stands for registered jack while 45 defines the number of interface standard.
In this post, I'll cover each and everything related to RJ45, why it used, features, and main applications. Let's dive right in and nail down everything you need to know.
Introduction to RJ45
RJ45 is a type of connector, mainly used for Ethernet networking including connection with PC network cards, data switches, WiFi access p ...
Hello friends, I hope you all are doing great. In today's tutorial, I am going to share a new Solar Panel Library for Proteus. I hope you guys are gonna enjoy this Proteus Library as it's not available in Proteus and we are presenting it for the first time. :) I am quite proud of my team. B|
We all know about Solar Panels which is an excellent renewable energy source. It is widely adopted by the inhabitants of this green planet as its totally free and converts solar energy into electricity. Solar panels are also used a lot in Engineering Projects especially related to renewable energy sources. Proteus doesn't have solar panels in its database that's why our team has designed this library. Using this Solar Panel Library for Proteus, now you can eas ...
Hello friends, I hope you all are doing great. In today's tutorial, I am going to share a new Infrared Sensor Library for Proteus. This IR sensor is not available in Proteus and we are sharing this library for the first time. I hope it will help in your Embedded Systems Projects particularly related to robotics and automation. So, if you want to work on this IR Sensor then I would suggest you to first design its simulation and then try your luck with hardware.
There are different types of Infrared Sensors & modules available in the market. Some of these modules have transmitter & receiver on separate chips and are mostly get activated when someone interrupts the light. The one we have designed has a transmitter & receiver on a single c ...
Hey Fellas! Hope you are doing well. Today, I am going to unlock the details on the Introduction to Arduino Mega 2560. It is a microcontroller board based on Atmega 2560 microcontroller. Arduino Boards have revitalized the automation industry with their easy-to-use platform where everyone with little or no technical background can get started with learning some basic skills to program and run the board.
I have updated articles previously on Arduino Uno, Arduino Nano, and Arduino Pro Mini. All these boards function similarly in one way or the other. There are some basic features like PCB layout design, size, number of analog pins and breadboard friendly nature that make them different from each other. In terms of coding, all these boards are progra ...