Welcome to the fourth lesson of this python course. Our previous session taught us how to utilize the print function in python, so we have a firm grasp of the terminology and the functions themselves. In this lesson, we'll cover a few more Python terms, such as:
Strings
Operators
Input function
Also, we'll build a simple program to print out an imagined dog so that we may better grasp how these concepts are employed. So, let's get started now.
Why do we need to understand these terms?
Programming is a lot like building a structure out of blocks. Even with just a few types of children's toy blocks and some time and imagination, you can build anything. Because we'll be utilizing these phrases all the time in programming, it's critical that you know what they mean and how to use th ...
The "Hello, World!" program is a computer programming classic that has stood the test of time. For beginners, "Hello, World!" is a simple and full first program that introduces the basic syntax of programming languages and can be used to evaluate systems and programming environments.
The more you learn about Python, the more you may use it for your own purposes. Data analyst, application developer, or the ability to automate your work processes are all examples of jobs that can be automated.
This Python 3 tutorial will show you how to create a simple "Hello, World" program. Python's basic syntax and components include the following:
Variable-types
Data structures
Math operators
loops
Different function calls
Input and output functio ...
The first step to becoming a Python coder is to install or update Python on your computer. Python can be installed in a variety of ways, including through the official Python.org distribution, a software package manager, the IoT (Internet of Things) and scientific computing, just to name a few.
In this article, we'll be using official Python distributions, which are often the best option for beginners.
What will you learn from this?
How to check if you have the right Python release installed on your computer before proceeding.
Installation of Python3 on Windows pc and Linux machine.
How to use Python on the web with the help of online interpreters.
INSTALLING REQUIRED PYTHON ENVIRONMENTS
Installing the most recent versions of Python and ...
Greetings! I sincerely hope everything is going well for you all. In this course, we are going to learn step-by-step how to program in Python. The course covers all you need to know about the Python language, from installation to advanced topics. In addition, we'll talk about Python career jobs and do a few projects to strengthen your skills. According to my research, Python is among the top programming languages in use today. (I mean, no offense). Since I am also a Python programmer, I may sound a little prejudiced, but I can certainly declare that I am a huge fan of the language. This tutorial series is meant for absolute beginners with no prior knowledge of python programming, it is also of great help for experienced python programmers looking to brush up on their knowledge. Anyway, le ...
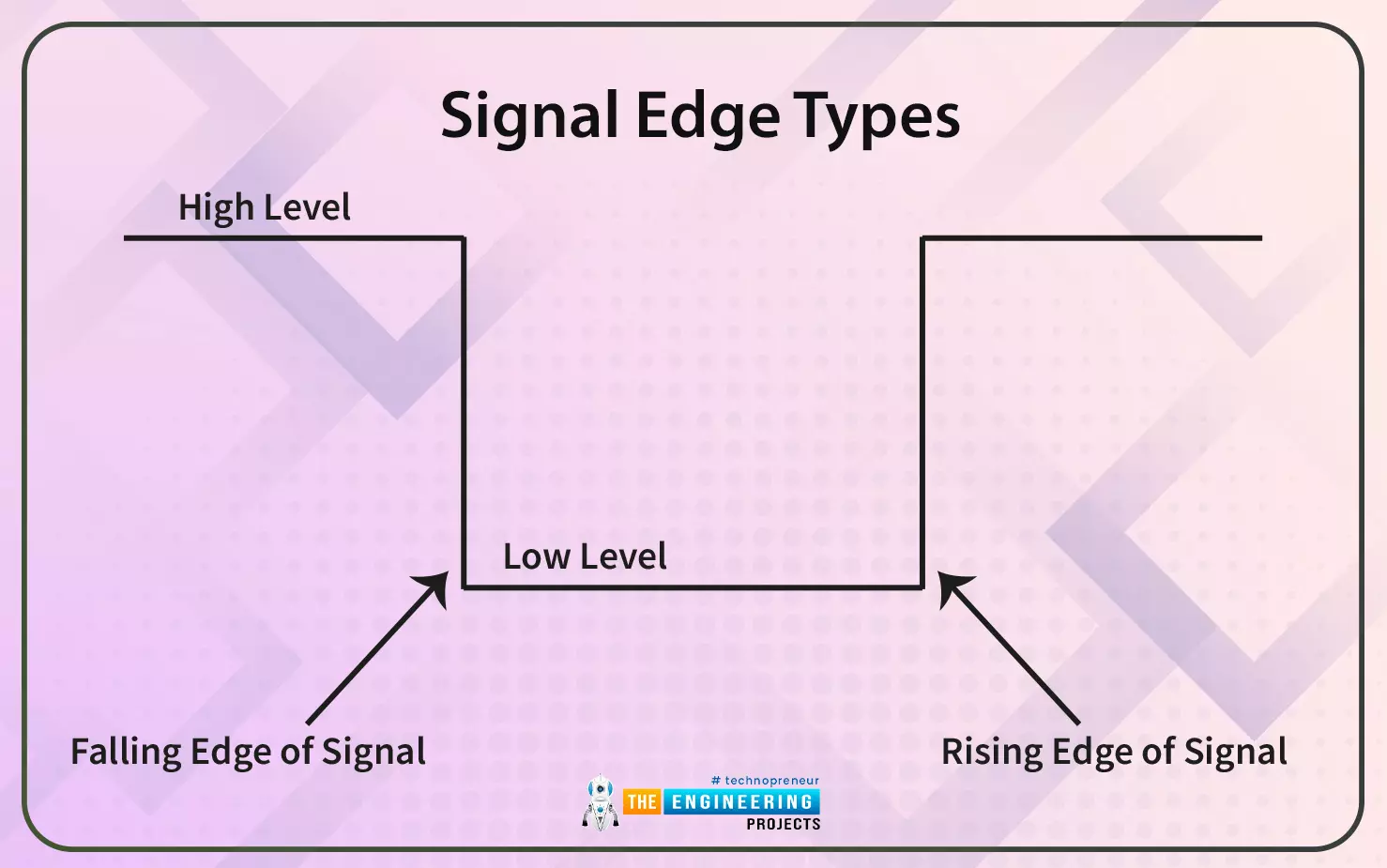
PWM stands for Pulse-Width Modulation. Once the switching frequency (fsw) has been chosen, the ratio between the switch-on time (TON) and the switch-off time (TOFF) is varied. This is commonly called duty-cycle (D). The duty cycle can be between 0 and 1 and is generally expressed as a percentage (%).
D = TON / (TON + TOFF) = TON x fsw
The variation of the pulse width, made at a high frequency (kHz), is perceived as continuous and can be translated into a variation of the rotation speed of a motor, dimming a LED, driving an encoder, driving power conversion, and etc. The use of PWM is also widely used in the automotive sector in electronic control units (ECU - Electronic Control Unit) to manage the energy to be supplied to some actuators, both fix ...
A Digital to Analog Converter(DAC) performs the task of converting digital words of n bits into voltages whose amplitude will be proportional to the value of the code expressed by the words themselves. Since the input binary words represent a succession of finite codes, the voltage coming out of a DAC cannot be continuous over time but is made up of as many levels as the converted codes are. This means that the devices to which the analog signal produced by a DAC is sent must filter it with a low-pass characteristic (integrating action). The operating criterion of a DAC is simple: in fact, it is sufficient to have a succession of as many voltages as there are convertible codes, obtained for example by means of a weighted resistance network (i.e. t ...
An Analog to Digital Converter (ADC) converts a continuous signal (usually a voltage) into a series of discrete values ??(sequences of bits). The main features are:
Resolution (in analog terms): It is the minimum variation of the analog input voltage that can determine the variation of the LSB, that is of the least significant bit of the output code. Since the quantization step Q corresponds to the LSB, it can be said that the resolution coincides with the quantization step Q (and therefore is measured in Volts). We can say that the quantization step Q corresponds to the LSB because two contiguous quantization bands, each of amplitude Q, are identified by codes that differ only for the least significant bit.
Resolution (in digital terms): It is the number n of bits present at the co ...
The SPI (Serial Peripheral Interface) protocol, or rather the SPI interface, was originally devised by Motorola (now Freescale) to support their microprocessors and microcontrollers. Unlike the I2C standard designed by Philips, the SPI interface has never been standardized; nevertheless, it has become a de-facto standard. National Semiconductor has developed a variant of the SPI under the name Microwire bus. The lack of official rules has led to the addition of many features and options that must be appropriately selected and set in order to allow proper communication between the various interconnected devices. The SPI interface describes a single Master single Slave communication and is of the synchronous and full-duplex type. The clock is transmitted with a dedicated line (not necessari ...
EEPROMs (Electrically Erasable Programmable Read-Only Memories) allow the non-volatile storage of application data or the storage of small amounts of data in the event of a power failure. Using external memories that allow you to add storage capacity for all those applications that require data recording. We can choose many types of memories depending on the type of interface and their capacity.
EEPROMs are generally classified and identified based on the type of serial bus they use. The first two digits of the code identify the serial bus used:
Parallel: 28 (for example 28C512) much used in the past but now too large due to having many dedicated pins for parallel transmission
Serial I2C: 24 (for example 24LC256)
Serial SPI: 25 (for example 25AA080A)
Serial - Microwire: 93 (for ...
Hello friends, I hope you all are doing great. In today's lecture, we will have a look at the I2C Communication with STM32 Microcontroller board. I am going to use the Nucleo board for today's lecture. In the previous lecture, we have discussed STM32 Serial communication both in Interrupt Mode and polling Mode. Today, we will study another way of communication(i.e. I2C) with STM32. So, let's first have a look at what is I2C Communication:
What is I2C Communication?
I²C (Inter-Integrated Circuit) is a two-wire serial communication system used between integrated circuits. Like any serial protocol, one of its advantages is that of using only two lines that transmit or receive a sequence of bits, the limit is the communication speed which has been improved over the years.
The bus was conceive ...