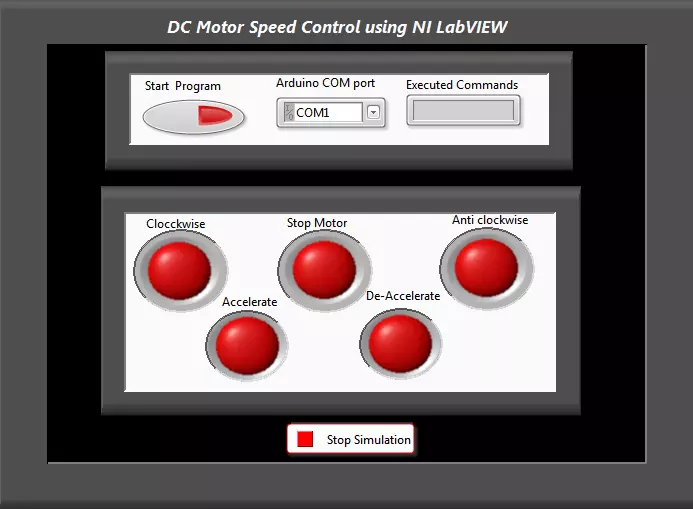
Hello everyone! I hope you all will be absolutely fine and having fun. Today, I am going to share my knowledge with all of you guys, about how to make a simple Virtual Instrument (VI) for DC Motor Speed Control in LabVIEW. In my previous tutorials, I have worked on DC Motor Speed Control using Arduino, in which I have controlled the DC Motor Speed using Arduino and after that I made some advancements in it and then created DC Motor Speed Control in Matlab in which commands were sent from Matlab. So, now we are gonna do the DC Motor Speed Control in LabVIEW.If you are working on DC Motor then you should also have a look at DC Motor Direction Control using Arduino.
In this tutorial, I am going to work on the program for DC Motor speed Control usin ...
Hello friends! I hope you all will be absolutely fine and having fun. Today, I am going to tell you guys that how to design a simple algorithm for Stepper Motor Speed Control in MATLAB by simply sending different commands to the serial port from Matlab to Arduino. You should first read Stepper Motor Speed Control using Arduino because I am gonna take that tutorial further and will do the Stepper Motor Speed Control in Matlab. So, I would suggest you to first have a look at that tutorial before reading this one. Moreover, you should also have a look at DC Motor Direction Control in Matlab, DC Motor Speed Control using Arduino. Stepper Motor Direction Control Direction Control in Matlab, Stepper Motor Direction Control using NI LabVIEW and Stepper ...
Hello friends! I hope you will be absolutely fine and having fun. Today, I am going to share that how to make a program for Stepper Motor Direction Control using Matlab. I am going to share this tutorial on demand. I have also make different programs for DC Motor Direction Control using Arduino, DC Motor Direction Control in Matlab, DC Motor Direction Control using LabVIEW, DC Motor Speed Control using Arduino, DC Motor Speed Control using Matlab and Stepper Motor Direction using Arduino in my previous tutorials. So before going into the detail of this tutorial you must have to go through these tutorial because I will use the same hardware and a bit changed Arduino source code. In this tutorial I will make an algorithm to send different commands ...
Hello friends! I hope you all will be absolutely fine and having fun. Today, I am going to tell you guys that how to design a simple algorithm for DC Motor Speed Control in MATLAB by simply sending different commands to the serial port from Matlab to Arduino. In my previous tutorials, DC Motor Direction Control using Arduino, we have seen the direction control of DC Motor via Arduino. So, I would suggest you to first have a look at that tutorial before reading this one. Moreover, you should also have a look at DC Motor Direction Control in Matlab and DC Motor Speed Control using Arduino in which I have discussed in detailed about how to make simple and easy programs to control the direction of DC motor in both clockwise and anti clockwise directi ...
Hello friends! I hope you all will be absolutely fine and having fun. Today, I am going to share my knowledge with all of you guys about how to do the DC Motor Direction Control in Matlab using serial communication with Arduino UNO. Serial communication is a very common and fast mean of communication now a days. In almost every engineering related projects we need to continuously send and receive data from micro controller to the computer and vice versa. So, I used this type of communication between Matlab and Arduino UNO. You must have a look at my previous tutorial DC Motor Direction Control using Arduino because I am gonna use the same hardware and Arduino code and in today's tutorial I am gonna interface that hardware project with MATLAB so it ...
Hello friends! I hope you all will be absolutely and having fun. Today, I am going to share my knowledge with all of you on Area and Volume Calculation of different shapes with the given radius in NI LABVIEW. First of all I want to tell you that the area basically shows the space inside an object having two dimensions. Where as, Volume is the parameter which shows the space occupied by a three dimensional object.
So, we can roughly say that the volume is the area of a three dimensional object. For example you want to go for a trip and you have to pack your bags. So, in this case you have to make some space in your bag to put the clothes inside it. The space that you make for the clothes is basically an application of volume. We can also called i ...
Hello everyone! I hope you all will be absolutely fine and having fun. Today, I am going to share my knowledge with all of you guys, about Communication Signals Generation in LabVIEW. In the previous tutorial, we have seen the Introduction to LabView and after that we have designed our First Project using LabView Programming so if you haven't read them yet then I would suggest you to read them so that you have the basic knowledge of LabView. In earlier days people used to convey their messages or some important notifications using a piece of paper and by delivering it to the other places with the help of the pigeons. It took a lot of time for the message conveying procedure because there are some notifications or messages in which such a huge delay ...
Hello friends! I hope you all will be absolutely fine and having fun. Today I am going to share my knowledge with all of you guys that how to make a simple program for Quadratic Roots Calculation in LabVIEW. Quadratic equation is a second order basic equation. It plays a vital role for a lot of mathematical problems. The answer obtained from this equation is knows as its roots (also called quadratic roots). It can not have more than two roots. Roots can be 0,1 or maximum 2 and not more than that. We can solve quadratic equation in three different ways, but in this tutorial we will focus on one of them only. Here, I am going to tell you about form and the different ways of Quadratic Roots Calculation.
Ways to Solve Quadratic Equation
The quadratic ...
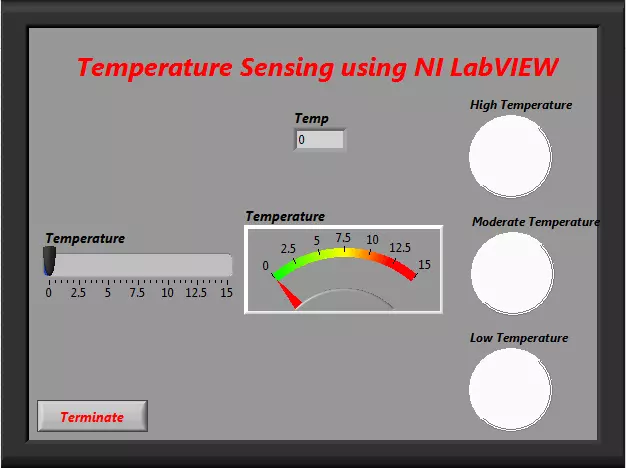
Hello friends! I hope you all will be absolutely fine and having fun. Today, I am going to share my knowledge about how to create program for "Temperature Sensing using NI LabVIEW". To sense the temperature is compulsory at a lot of the places e.g. refrigerators, air conditioners, storage rooms, kitchen etc. At these places to sense the temperature and its proper indication is compulsory because it can cause serious problems otherwise. For example, if the temperature in the food storage room is higher than an adjusted threshold, it will be harmful for all of the food items.
You can also consider "Fire Alarm" as an example of temperature sensor. First of all it measures the level of the temperature. If it founds that the temperature is higher tha ...
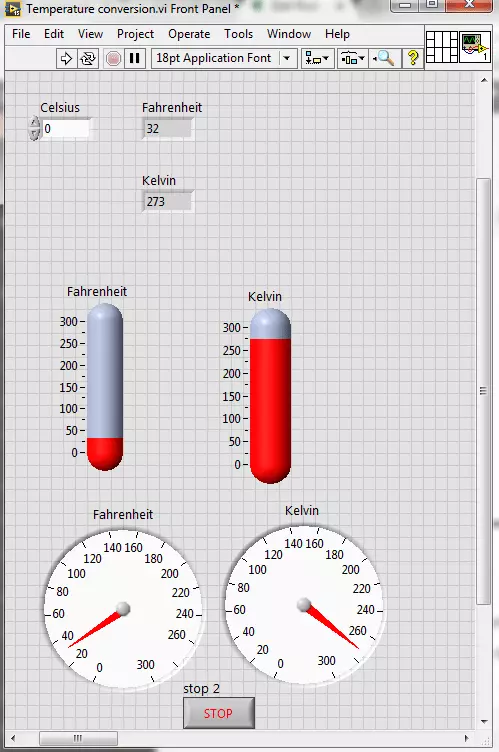
Hello friends! I hope you all will be absolutely fine. Today, I am going to share my knowledge with all of you guys, on how to make a Temperature Conversion in LabVIEW. Temperature is actually measured with different units at different places all across the world. However, there are three basic standard units for measuring the temperature i.e. Celsius, Fahrenheit and Kelvin. We can convert them in each other by performing some mathematical operations. In this tutorial I am going to elaborate only one of these conversions.
I would like to tell the standards of these scales with reference to the freezing and boiling point of water. "Celsius" scale is basically the scale based on 0 degrees for the freezing point of water and 100 degree for the boil ...