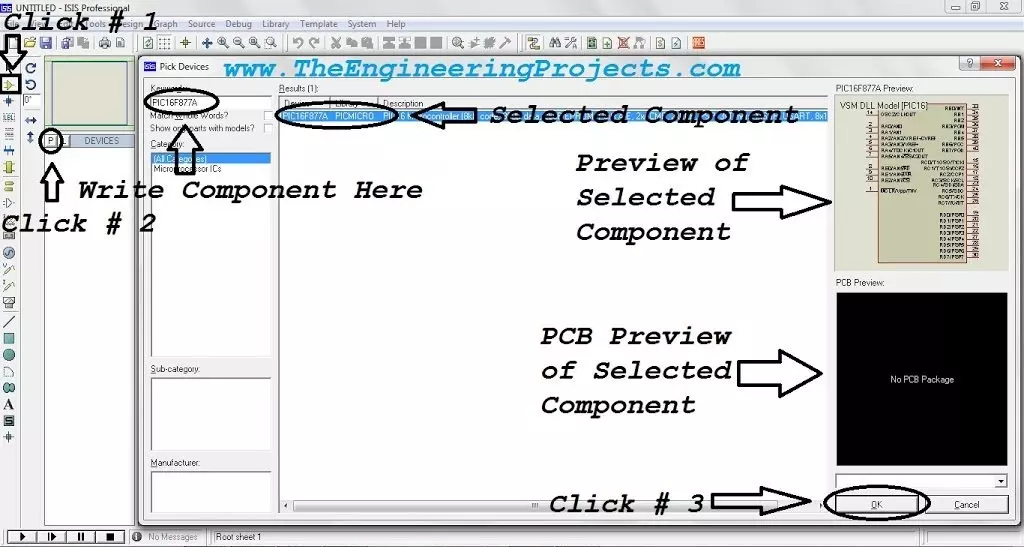
Hello friends, I hope you all are doing great. In today's tutorial, we will simulate our First Electronics Project in Proteus ISIS. It's our 2nd tutorial in Proteus series. In our previous tutorial, we have seen a basic Introduction to Proteus and today, we will design a simple electronics circuit in it and will also simulate it.
If you want to work on Proteus, then you must have some prior knowledge about electronics. Proteus doesn't provide any suggestion about circuit designing so if you don't have electronics knowledge then you can't work with Proteus. Throughout this series, I will keep on explaining electronics circuits as well and will also embedded related components' links. So, if you are new to electronics then no need to worry and just ...
Hello readers, I hope you all are doing great. In today's tutorial, I am going to share a detailed Introduction to Proteus. It's our first tutorial in Proteus series. Today's tutorial is for beginners but still I would suggest you to read it once, as I am going to explain why Proteus?
Throughout our Engineering Course, we have to design a lot of electronics or embedded circuits and it's always a best approach to simulate these circuits first on some simulation software i.e. Proteus, PSPice etc., before assembling them on actual hardware. Among these simulation software, Proteus is my favorite one so let's get started with detailed Introduction to Proteus:
Introduction to Proteus ISIS
Proteus Design Sui ...
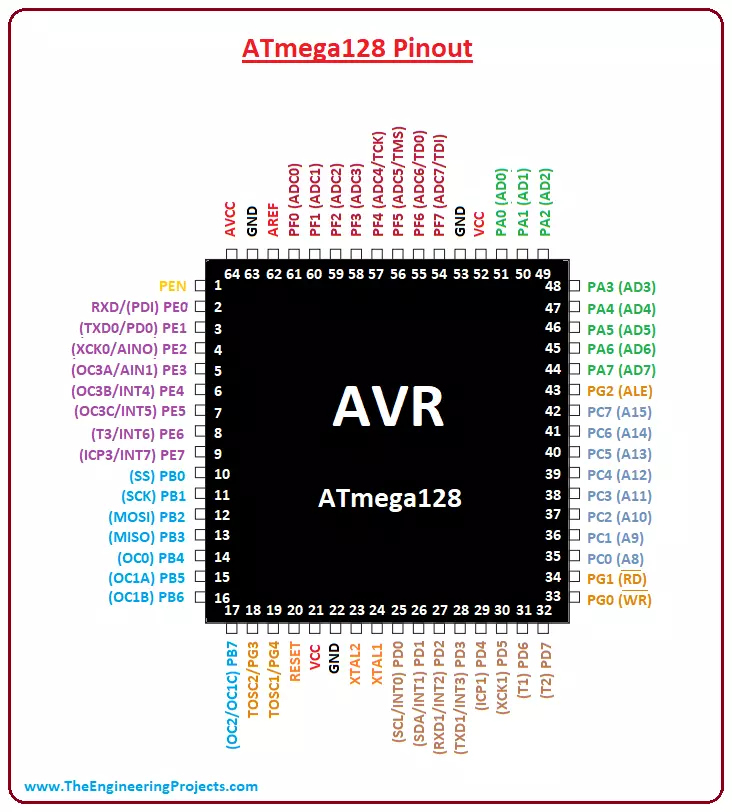
Hey Guys! Hope you are doing well. I am back to feed you with valuable information relating to engineering and technology. Today, I'll uncover the details on the Introduction to ATmega128. It is an AVR, 8-bit low power microcontroller, that comes with a 64-pin interface and is based on RISC architecture. Availability of 133 Powerful Instructions with single clock cycle and 32 x 8 General Purpose Working Registers make this device an ideal choice for many applications where decent code execution is required.
The memory space incorporates on this module is more than normal AVR controllers including Program memory around 128K, enough to store the number of instructions on a single chip.
In this post, I'll try to cover each and everything related t ...
Hi Friends! Hope you are doing well. I am back to give you a daily dose of useful information so you can excel and improve as per your technical needs and requirements. Today, I'll uncover the details on the Introduction to ATmega8. It is an 8-bit AVR microcontroller that is based on RISC CMOS technology and comes with a 28-pin interface for the PDIP package. The Program memory is 8K Flash while RAM and EEPROM are 1K and 512 bytes respectively.
Microchip has been the main source for producing PIC and AVR microcontrollers that are mainly used in embedded and industrial automation systems. These modules can perform a number of functions on a tiny chip, preventing you from spending too much and purchasing external components for laying out automation ...
Hi Friends! Hope you are doing well. We always strive to give you valuable information as per your needs and requirements so you keep coming back for what we have to offer. Today, I'll uncover the details on the Introduction to ATmega168. It is an 8-bit AVR microcontroller that comes with 32-pin interface and is mainly based on RISC CMOS technology. The Program memory is 16K, based on Flash, and incorporates read-write capabilities.
The module comes with a wide temperature range from -40 to 85 ºC while operating voltage ranges from 1.8 to 5.5 V. If you are working on project that is related to automation and embedded systems, you can not write off the importance of this module that comes with an ability of performing a number of functions at once ...
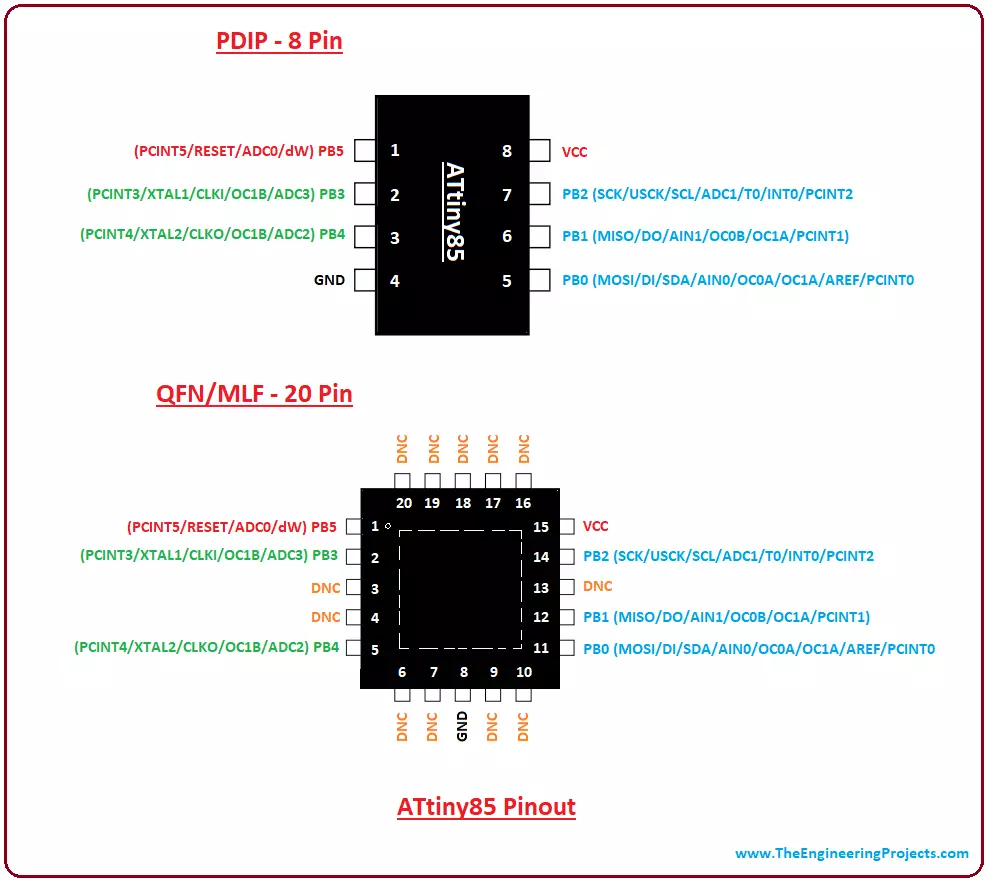
Hey Guys! Hope you are doing well. I am back to give you a daily dose of valuable information. Today, I'll discuss the details on the Introduction to ATtiny85. It is an 8-bit AVR microcontroller, introduced by Microchip, and is based on RISC CPU. It comes with 8-pin interface (PDIP) and falls under the category of low power controllers. Programmable watchdog timer and 10-bit ADC converter are added in the device that makes it suitable for sensor interfacing and resetting the device in case it gets stuck in an infinite loop.
Microchip never fails to satisfy the requirements of any individual by providing flawless microcontroller modules that are directly or remotely connected with automation and embedded systems. With the invention of these tiny o ...
Hello friends, I hope you all are doing great. In today's tutorial, I am going to share a new Solar Panel Library for Proteus. I hope you guys are gonna enjoy this Proteus Library as it's not available in Proteus and we are presenting it for the first time. :) I am quite proud of my team. B|
We all know about Solar Panels which is an excellent renewable energy source. It is widely adopted by the inhabitants of this green planet as its totally free and converts solar energy into electricity. Solar panels are also used a lot in Engineering Projects especially related to renewable energy sources. Proteus doesn't have solar panels in its database that's why our team has designed this library. Using this Solar Panel Library for Proteus, now you can eas ...
Hey Fellas! Hope you are doing fine. Microcontrollers play an important role in the development of embedded systems. They are used where automation is an integral part of the system. Today, I am going to unlock the details on the Introduction to Atmega16.
It is a 40-pin low power 8-bit microcontroller which is developed using CMOS technology and based on AVR architecture. This is the most commonly used AVR microcontroller which belongs to Atmel Mega family.
You must have a look at microcontroller called Atmega328 that also belongs to the mega family.
Other microcontrollers that are readily available and fall under AVR category are Atmega 8 and Atmega 32. All these controllers perform similar tasks, however, they are only different in terms of ...
Hey Guys! Hope you all are doing great and having fun. Today, I am going to discuss the details on the Introduction to Buck Converter. It is a power converter which is mainly used to stepping down the voltage from its input to the output load. It mainly consists of two semiconductors and one energy storing components which can be either capacitor or inductor. It works best in the circuits where electrical isolation is not required.
Introduction to Buck Converter
Buck converters are power converters which are mainly used for converting high voltage to the low voltage. These converters are highly efficient, showing almost 90% of efficiency.
They are useful for performing a special task like converting the huge supply voltage of 12 V in the co ...
Hey Fellas! I warmly welcome you to be here. Today I'm going to discuss the Introduction to Transformer. I'll unlock the complete details of its working principle, construction, types, and applications. It is widely used for the transformation of electrical energy. The inception of transformation has revolutionized the electrical field and made our life easy more than ever before.
Because of its extensive advantages, it works as a core for electrical engineering. In today's tutorial, I have explained in detail all about Transformer but still if you got trouble anywhere, then you can ask in comments and I will try my best to resolve them. So, now let's get started with Introduction to Transformer:
1. Introduction to Transformer
Transformer is a ...