Hello Learners! welcome from the team of The Engineering Projects. We hope you are having a productive day. We are working on a series of Blogs based upon the core knowledge about Digital Logic Gates and Circuits. In this tutorial, we'll know about the SR Flip Flops and after brief introduction we will simulate SR Flip Flops in Proteus. Let's have a glimpse on the topics of today:
What are Flip Flops?
What are the types of Flip Flop?
How does we design the Truth Table of SR Flip Flops?
What are further classes of SR Flip Flips?
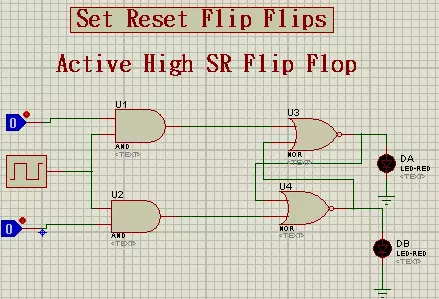
Implementation of SR Flip Flops in Proteus.
Flip Flops
Flip Flops are extremely important Circuits of Digital Logic Design. We Introduce the Flip Flops as:
"Flip Flops are type of sequential Logic Circuit that co ...
Hello Learners, hope you are doing well. I am here with a new tutorial. We'll discuss about Junction Field Effect transistors. In this tutorial, we will learn the basic Introduction to JFET nad will also have a look at its practical Implementation and simulation in Proteus.
Basically, Junction Field Effect is a type of transistor, similar to Bipolar Junction Transistors but they have different characteristics due to some reasons as discussed below:
Introduction to JFET
We Define the JFET as:
"Junction Field Effect transistors or simply JFET is the semiconductor ,Voltage Control, three terminal device that is present in both configurations either N channel or P channel."
JFET are named so because the the operation of JFET relies on the Field of th ...
Hi Guys! I welcome you on board. Happy to see you around. In this post today, I’ll walk you through the Introduction to ATmega4809.
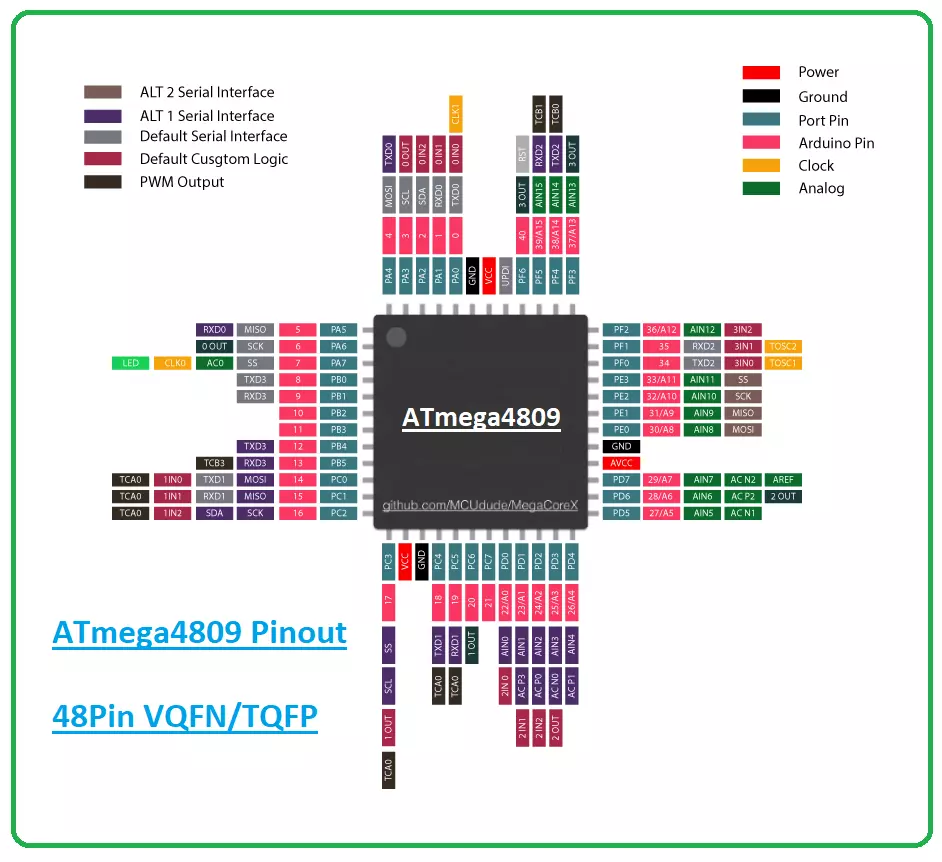
The ATmega4809 is a type of microcontroller that belongs to the megaAVR® 0-series. It features an AVR® processor with a clock speed running at up to 20 MHz. It comes with a Flash memory size up to 48 KB, 256 bytes of EEPROM, and 6 KB of SRAM. It is available in 28-, 32-, 40-, or 48-pin packages.
I suggest you buckle up as I’ll detail the complete Introduction to ATmega4809 covering datasheet, pinout, features, power ratings, and applications.
Let’s get started.
Introduction to ATmega4809
The ATmega4809 microcontroller belongs to the megaAVR® 0-series that contains an AVR processor.
The series carries low power ...
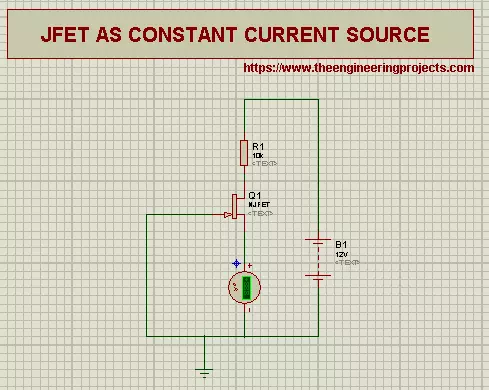
Hi Pupils, Welcome to another Experiment of Proteus at The Engineering Projects. Previously, we saw what are the Junction Field Effect Transistors. Today we'll learn about some of the applications of Junction Field Effect Transistors.
Just before the Experiment, it is useful to revise that:
Transistors are three terminal, unipolar Devices. The terminals of Junction Field Effect Transistor are named as :
Drain
Source
Gate
The Gate Terminal is common to both Source and Drain.
Prior to start, let's clear some Concepts about Junction Field Effect Transistor.
Resistor
Resistor is an electrical device. we define the resistors as:
"A Resister is a two terminal Passive electrical device that shows the electrical resistance and is useful in almos ...
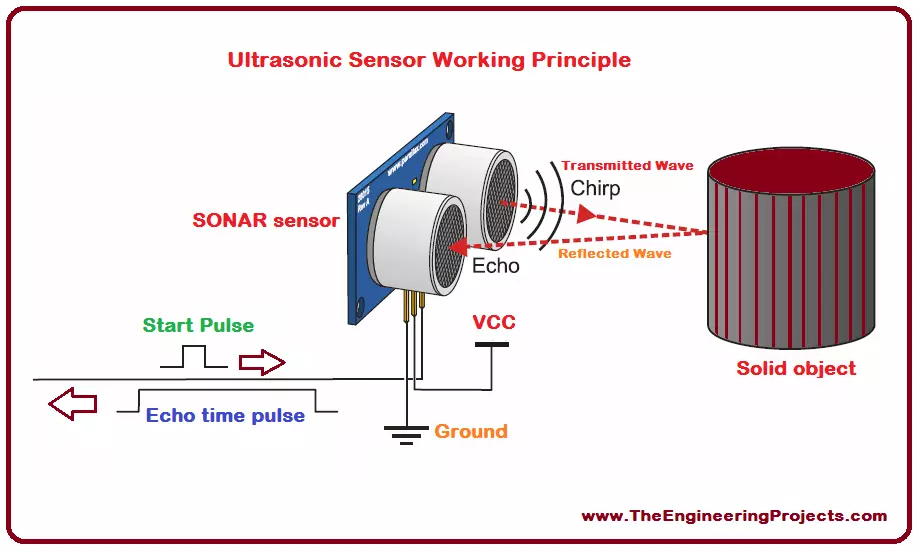
Hello everyone! I hope you all will be absolutely fine and having fun. Today, I will give you a detailed discussion on myRIO Ultrasonic Sensor Interfacing. In this tutorial, you will learn about NI myRIO ultrasonic sensor interfacing. We will go into the details of the ultrasonic sensor and then will move forward towards its interfacing with myRIO. I have already shared many articles on ultrasonic sensors and will share their link in this article as well.
The ultrasonic sensor is also known as SONAR (Sound Navigation and Ranging). As it is clear from its name, it transmits sound waves and these waves are received back to it after getting reflected from any object. It measures the total time elapsed during the entire transmission as well as during the reception of the reflected waves. The ...
Hi Friends! I welcome you on board. Happy to see you around. In this post today, I’ll walk you through the Introduction to Arduino Pico.
Arduino Pico is the world’s smallest Arduino compatible board, as said by Arduino Official Page. Because of its small size & low weight, it is normally used in autonomous projects i.e. drones, robots, quadcopters etc. where size is the real issue.
Arduino boards are introduced in modern electronics, to make projects economical and easy to design. A common man with no prior knowledge about programming can get hands-on experience with them. This smallest Pico version is readily available to turn your innovative thoughts into reality.
I suggest you read this post all the way through as I’ll detail the complete I ...
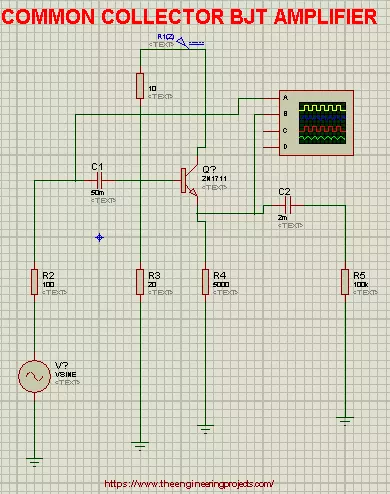
Hi Mentees, Welcome to a new tutorial at The Engineering Projects. Today You will unearth about Common Collector bipolar Junction Transistor Amplifiers. Before this, we learnt about two types of Configurations of Transistors named Common Emitter BJT Amplifiers and Common Base BJT Amplifiers.
In this tutorial We'll discuss about:
Introduction of Common Collector BJT Amplifier.
Basic Concepts for the Common Collector BJT Amplifiers.
Implementation of Common Collector BJT Amplifiers in Proteus ISIS.
Characteristics and advantages of Common Collector BJT Amplifiers.
So that, you can get the best understanding about the topic and its practical implementation.
Introduction
1st of all, We'll have a brief definition of the Common Collector Ampl ...
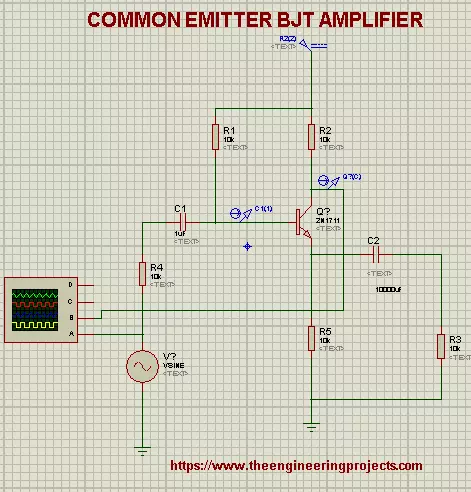
Hi Learners, I hope you are doing good. This lesson is about implementation of one of the types of Amplifiers i.e, Common Emitter BJT Amplifier. But, prior to this, we'll revise some basic concepts so that it will be easy for you to understand the roots of the Experiment.
We'll talk about:
What are Common Emitter Bi-Junction Transistors.
Concepts of Common Emitter Bi-Junction Transistors.
Implementation of Common Emitter BJT Amplifiers in Proteus ISIS.
Why we use Common Emitter BJT in Amplifiers.
What are Common Emitter Bi-Junction Transistors
There are three types of Configurations of a transistor named:
Common Emitter Configuration
Common Base Configuration
Common Collector Configuration
We chose the Common Emitter Configurati ...
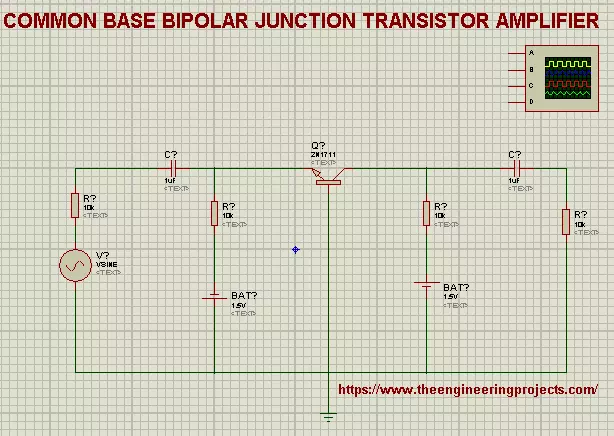
Hi mentees, Welcome to The Engineering Projects. If you are seeking for the Practical Implementation of Common Base bipolar Junction Transistor amplifier then you clicked at the best website because we'll cover the basic concepts and the procedure step by step.
So, Lets start the learning.
What is Common Base BJT Amplifier?
The precise definition of the Common Base BJT Amplifier is:
"The type of Bipolar Junction Transistor Amplifiers in which Base is Common to both emitter and Collector and Current gain is taken from the Base is called Common Base bipolar Junction Transistor Amplifiers."
Recall that a transistor has three regions i.e, Base, Collector and Emitter. Hence we design our Circuit in such a way that we get the output of current from ...
Hello everyone! I hope you all will be absolutely fine and having fun. Today, I would like to provide a complete discussion on DC Motor Control using myRIO. I will first provide you a bit information about DC motor then we will move forward towards DC motor control using myRIO. DC motor is an electronic instrument which is used to convert electrical energy into mechanical energy. It plays a vital role in industrial applications. It has also great importance for the engineers to to study about its working principle. DC motor has basically two input terminals. At one terminal we have to provide voltage supply and the other terminal will be attached to the ground (0V). And if we change the polarity, the direction of the motor will also be changed co ...