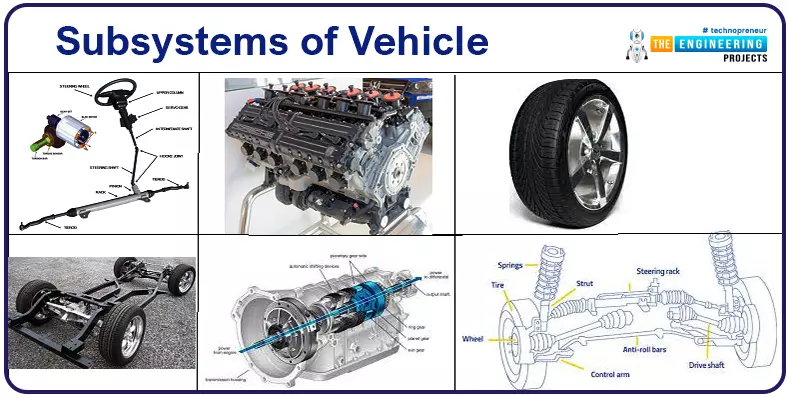
Just like the big bang theory which resulted in the world we live in. If we must mark a big bang for vehicles or the Automotive industry, it would be the invention of wheels. The invention of wheels redefined the aspects in which humans transported goods or traveled across places. Since, the invention of the wheel, transportation has always been contributing to the growth of society we live in. These vehicles later helped in conquering road travel. From its inception, the vehicle industry is technologically driven, pushing its own limits to find answers to challenges such as how can we travel faster? What will help us in making these rides more comfortable? Manually driven vehicles and their restrictions raise the need for a further quest. Quest f ...
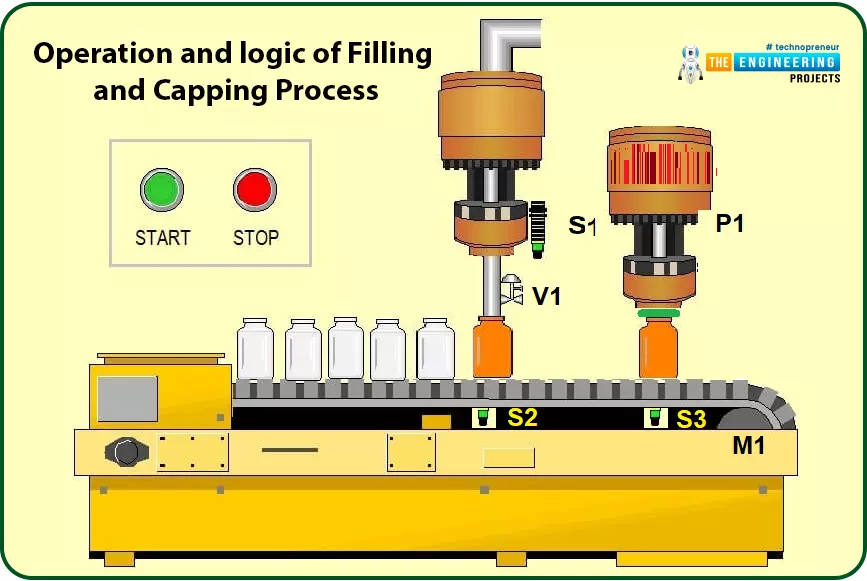
Hi friends, how are you doing? Today will integrate all of what we have learned so far in this series to build the first project based on ladder logic programming. Because we all are interested in industry, we pick one industrial project, Bottle Filling and Capping Projects, which is very common today. The problem we are going to solve today is bottle filling and capping. We have learned all basics of ladder logic including contacts and coils operation, logic gates, rising and falling edges, timers, and counters. So, today we will utilize all of these components to implement a complete ladder program of filling and capping problems.
Operation and Logic of Bottle Filling and Capping Process
For simplifying the operation of the process of filling and capping, fig. 1 shows the process flow ...