Hello everyone! I hope you all will be absolutely fine and having fun. Today, I will give you a detailed discussion on myRIO Ultrasonic Sensor Interfacing. In this tutorial, you will learn about NI myRIO ultrasonic sensor interfacing. We will go into the details of the ultrasonic sensor and then will move forward towards its interfacing with myRIO. I have already shared many articles on ultrasonic sensors and will share their link in this article as well.
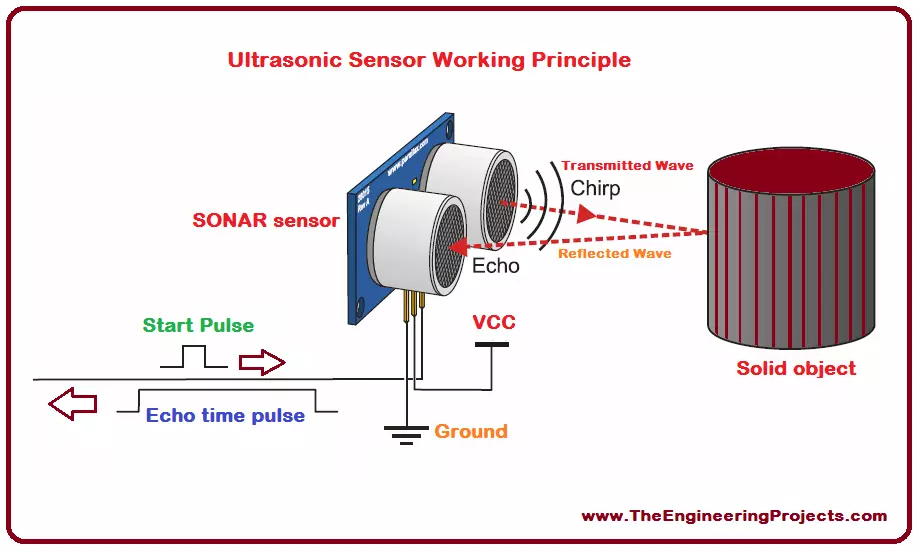
The ultrasonic sensor is also known as SONAR (Sound Navigation and Ranging). As it is clear from its name, it transmits sound waves and these waves are received back to it after getting reflected from any object. It measures the total time elapsed during the entire transmission as well as during the reception of the reflected waves. The ...
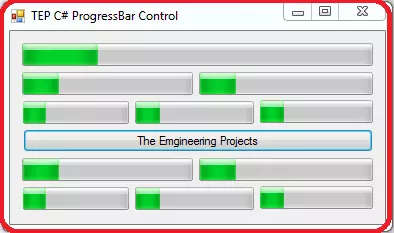
I hope you are doing good, In the tutorial, I'm going to explore C# ProgressBar Control. C# ProgressBar is used to express progress of any process. When you have to perform a long process within your desktop application then you have to use C# ProgressBar to show a user how much time left or how much progress is done. You can use C# ProgressBar for multiple purposes such as the downloading of life and result retrieving.
C# ProgressBar Control
A progress bar is used to show the progress of any process which takes a long time compared to normal processes. Mostly you have viewed these kinds of progress bar during the installation of software. C# ProgressBar has three parameters, Maximum, Minimum and the value. Maximum represents the max progress or up ...
Hi Friends! I welcome you on board. Happy to see you around. In this post today, I’ll walk you through the Introduction to Arduino Pico.
Arduino Pico is the world’s smallest Arduino compatible board, as said by Arduino Official Page. Because of its small size & low weight, it is normally used in autonomous projects i.e. drones, robots, quadcopters etc. where size is the real issue.
Arduino boards are introduced in modern electronics, to make projects economical and easy to design. A common man with no prior knowledge about programming can get hands-on experience with them. This smallest Pico version is readily available to turn your innovative thoughts into reality.
I suggest you read this post all the way through as I’ll detail the complete I ...
Hi Friends! Hope you’re well today. I welcome you on board. Happy to see you around. In this post today, I’ll detail PCB Design Online Services for Engineering Students.
PCB designing is a crucial part of making some electrical projects. If you’re a student, you can leverage these services to design PCB online. You can design many PCB layouts for a single layer or multilayer PCB. Moreover, you can test simulation online and see how your design is working that you’re going to execute in real-time.
PCB Design Online Services for Engineering Students
You’ll find a list of online PCB design services. And I can understand, when you’re given a lot of options, it is very difficult to choose the best pick. The reason I have got you covered. In this post, ...
Hi mentees, we are here with a new tutorial. I hope you all are fine. So far, we have been designing combinational circuits i.e. Adder, Subtractor, Multiplexer etc. using logic gates. But from today onward, we will design sequential circuits using logic gates i.e. Latches, Flip Flops etc. Let's quickly recall what's the difference between combinational & Sequential Circuits:
Combinational Circuits:
Combinational circuits only use the current state of the input values to generate the output.Examples of DLD Combinational Circuits are: Adders, Subtractors, Multiplexers etc.
Sequential Circuits
Sequential Circuits use both the current & previous states of the inputs to generate the output.Examples of DLD Sequential Circuits are: Latches, Flip Flops, Timers, Counters etc.
Digital M ...