Hi Friends! Hope you are doing well. In this platform we mainly cover information related to engineering and technology, no matter if you are a newbie or experts, you'll find something handy that may resonate with your field of interest. Today, I'll unlock the details on the Introduction to PIC18F4520. It is an 8-bit enhanced flash PIC microcontroller that comes with nanoWatt technology and is based on RISC architecture. Many electronic applications house this controller and cover wide areas ranging from home appliances, industrial automation, security system and end-user products.
This microcontroller has made a renowned place in the market and becomes a major concern for university students for designing their projects, setting them free from t ...
Hi Friends! Hope you are doing fine. I am back to give you have a daily dose of useful information. Today, I'll cover the Sheer Influence of Robotics on Employment Reduction.
Technology has been working for the betterment of the human race quite a while now, but we cannot brush off its negative impact in real time. Technology covers almost everything from medical, engineering, economic, automotive industry to transportation. Bank cashiers are widely replaced by smart machines. Glass bottler industries use sensors for checking half-filled bottles - a job previously reserved for a common operator. Nevertheless, writers also feel the heat and face a severe threat produced by the automatic content creators over the web.
Apart from getting exorbitan ...
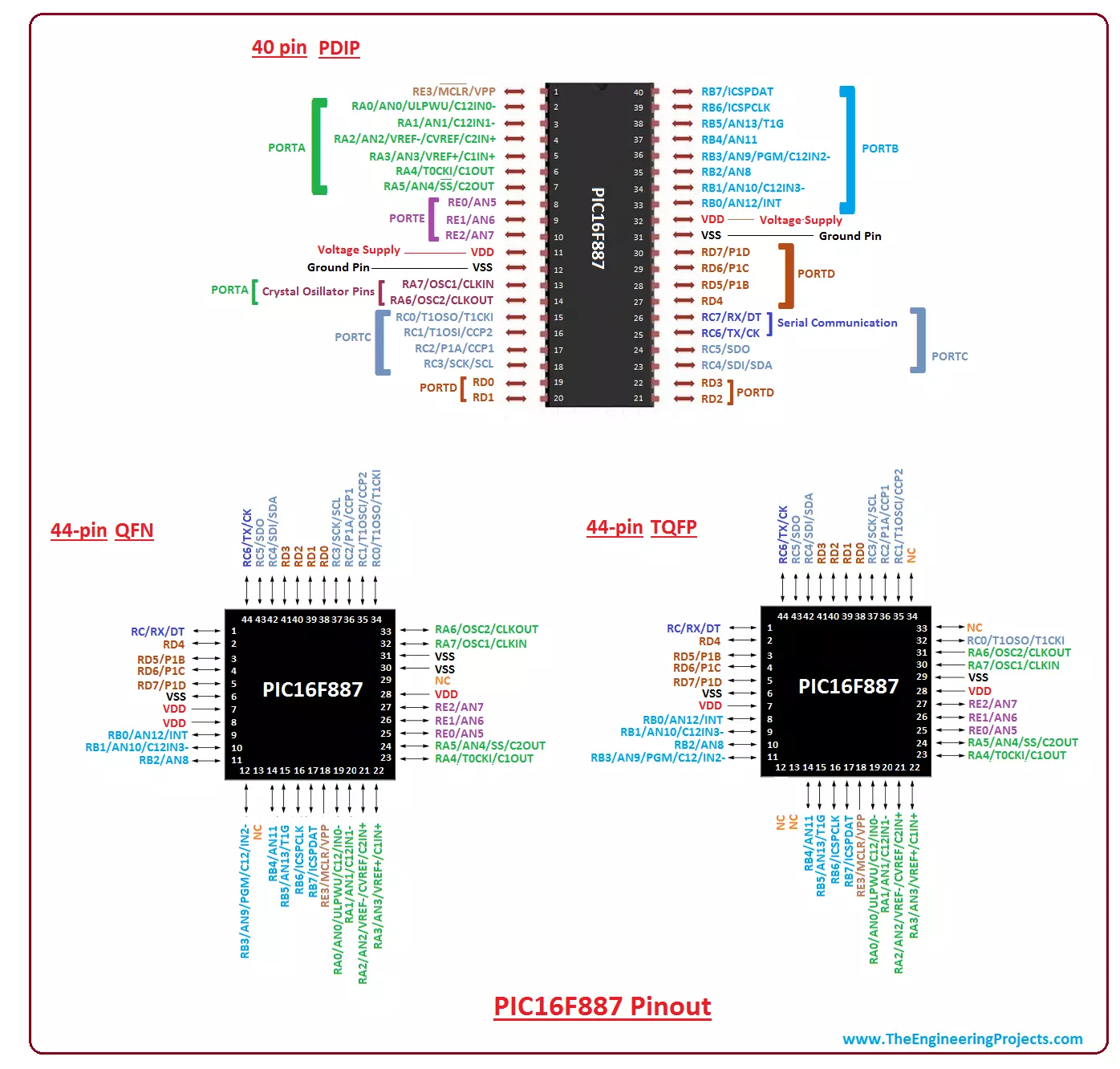
Hey Guys! Hope you are doing well. This is a platform where we keep you updated with valuable information so you keep coming back for what we have to offer. Today, I'll uncover the details on the Introduction to PIC16F887. It is a 40-pin PIC microcontroller, introduced by Microchip, and is a successor of PIC16F877A.
Microcontrollers have revitalized the technology by providing a flawless interface and an ability to perform numbers of functions on a single chip. Gone are days, when you had to rely on external components to develop your projects which might be time-consuming, covered more space, and required a number of prior skills before making your project in real time. Microcontrollers have made things easy by covering each and every aspect of ...