Hello everyone! I hope you all will be absolutely fine and having fun. Today, I am going to share my knowledge about Introduction to PIC12C508. PIC 12C-508 belongs to the family of high performance and cost effective micro controllers. It is a fully static eight (8) bit device. PIC 12C 508 micro controller is Complementary Metal Oxide Semiconductor (CMOS) which is based on EEPROM, EPROM and ROM.
PIC 12C-508 Microcontroller has Reduced Instruction Set Computing (RISC) having thirty three (33) instructions based on single words. Except program branches all of the instructions are single cycled i.e. 1 millisecond. Whereas two cycles are taken by the program branches. PIC 12C 508 has a lot amazing features e.g. eight (8) bit real time clock, power o ...
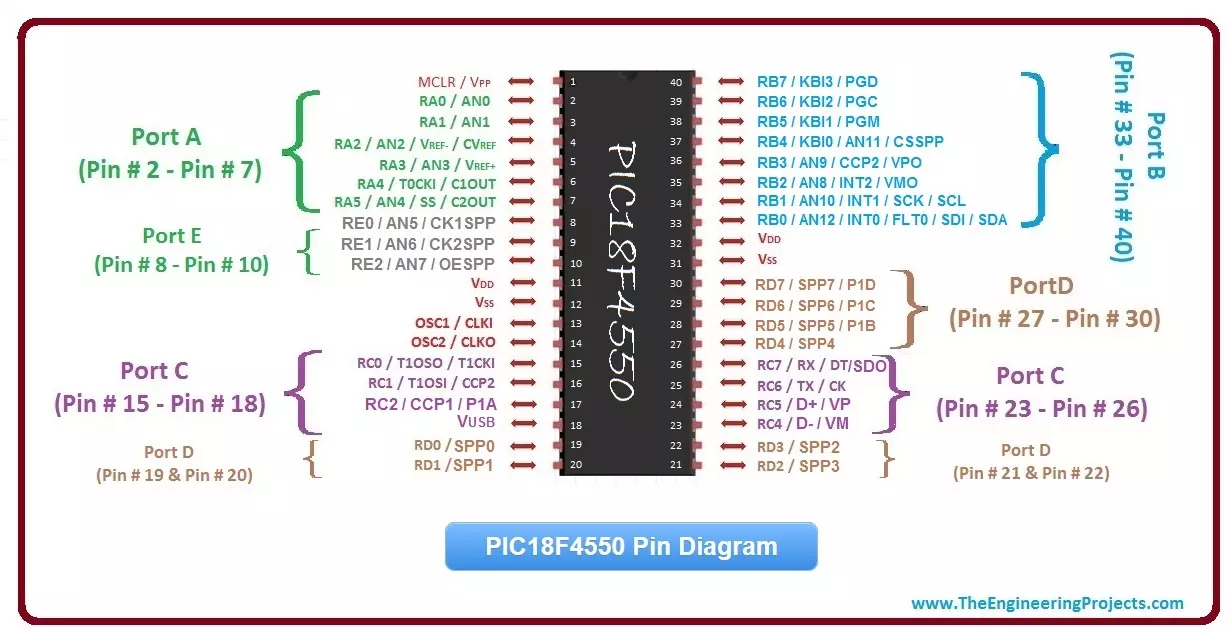
Hello friends I hope you all are doing great. Today, I am going to give you a detailed Introduction to PIC18F4550. Its one of the most renowned PIC Microcontroller and is used in almost every field. You should also have a look at my previous tutorial Introduction to PIC16F877a, as it will also be helpful. PIC18F4550 also has 40 Pins and is quite similar to PIC16F877a with some additional features.
In today's post we will get the general overview of this microcontroller, which is very essential if you wanna start working on it. If you have any problem in any part of it then ask your questions in comments and I will try my best to resolve them out. So, now let's get started with Introduction to PIC18F4550:
Introduction to PIC18F4550
PIC18F4550 is a ...
Hello friends, I hope you all are doing great and having fun with your lives. Today, I am going to give you guys a detailed Introduction to PIC16F877a. It's the most commonly used PIC Microcontroller because of its operational flexibility, availability and low cost. You can buy this PIC Microcontroller from almost every online electronic shop for just $2 - $3.
If you are new to PIC Microcontroller then read this complete post carefully and ask your queries in the comments. You should also have a look at this video in which I have given an Introduction to PIC16F877a:
Note:
You can download PIC16F877a Datasheet by Clicking below button:
Download PIC16F877a Datasheet(adsbygoogle = window.adsbygoogle || []).push({ });
Introduction to PIC16F87 ...
Hello everyone, I hope you all are doing great. Today, I am going to share a very basic tutorial on PIC Microcontroller, which is Interfacing of Keypad with PIC Microcontroller. I have designed this simulation of Keypad with PIC Microcontroller in Proteus ISIS and the simulation along with code is given below for download. But I would suggest you to read it first and then design it on your own so that you learn most out of it.
In today's tutorial, I am not gonna discuss the details of How keypad works because I have discussed it in detail in my old tutorial Interfacing of Keypad with Arduino so if you don't have much idea about working of keypad then I would recommend you to read that tutorial first, before proceeding with today's tutorial. I hav ...
Hello friends, I hope you all are fine and having fun with your lives. Today, I am going to share a new project which is Receive SMS with Sim900 & PIC Microcontroller using AT Commands. I have already posted this same project on Arduino named as Receive SMS with AT Commands using Sim900 & Arduino. In that project, I have interfaced SIM900 module with Arduino but today I am gonna interface it with PIC Microcontroller.
I have also designed a GSM Library for Proteus using which you can easily now simulate your SIM900D module in Proteus. Sim900 Module is used to send and receive SMS and it is widely used in automation and security projects. I have also posted another Project in which I have designed the Proteus simulation of GSM based Home Sec ...
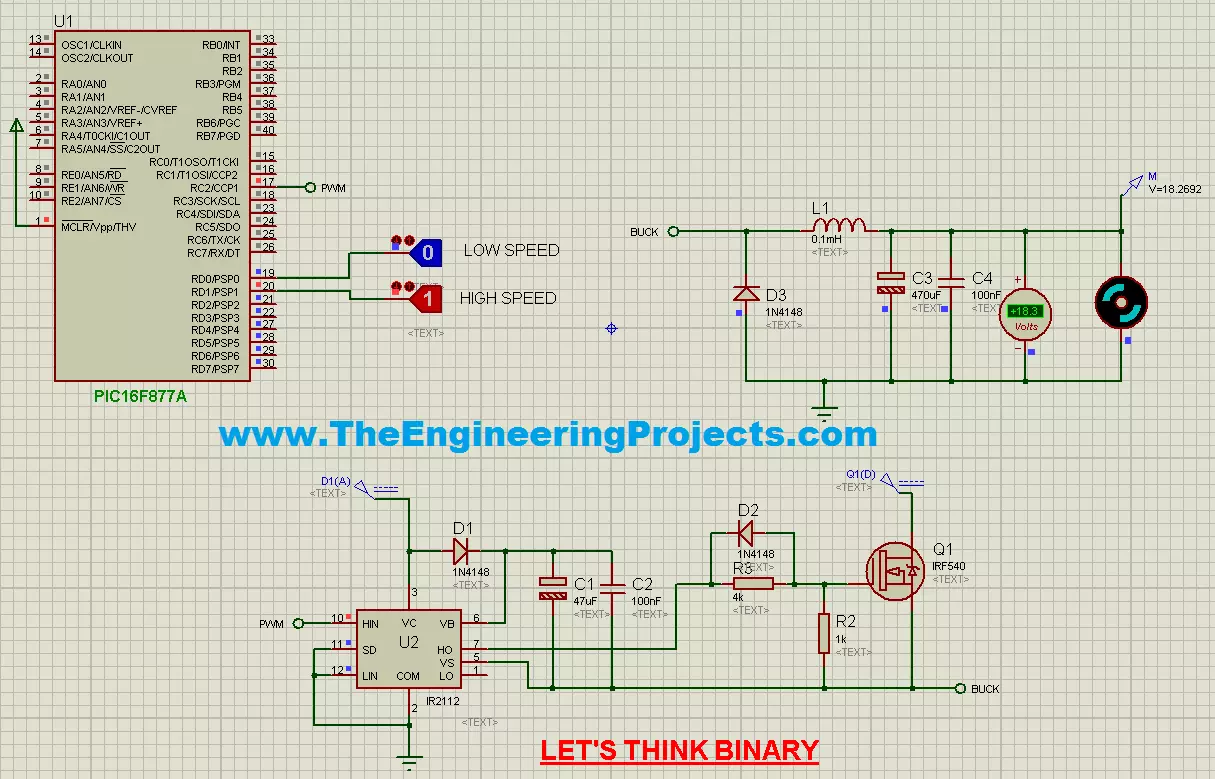
Hello friends, hope you all are fine and having fun with your lives. Today's tutorial is about speed control of DC Motor using PIC Microcontroller. I haven't written this tutorial by myself. Instead this tutorial is written by one of my very good friend Salah Dahouathi. We had an interaction through his awesome Facebook group Let's Think Binary and I would suggest you guys to join it as well, because he posted many projects in his group. So, after having a look at his work, I asked him to write for our blog which he gladly accepted and here's his first post. :) I hope you guys are gonna enjoy this one and will get knowledge out of it. So let's get started with this speed control of DC Motor using PIC Microcontroller tutorial.
Many applications in ...
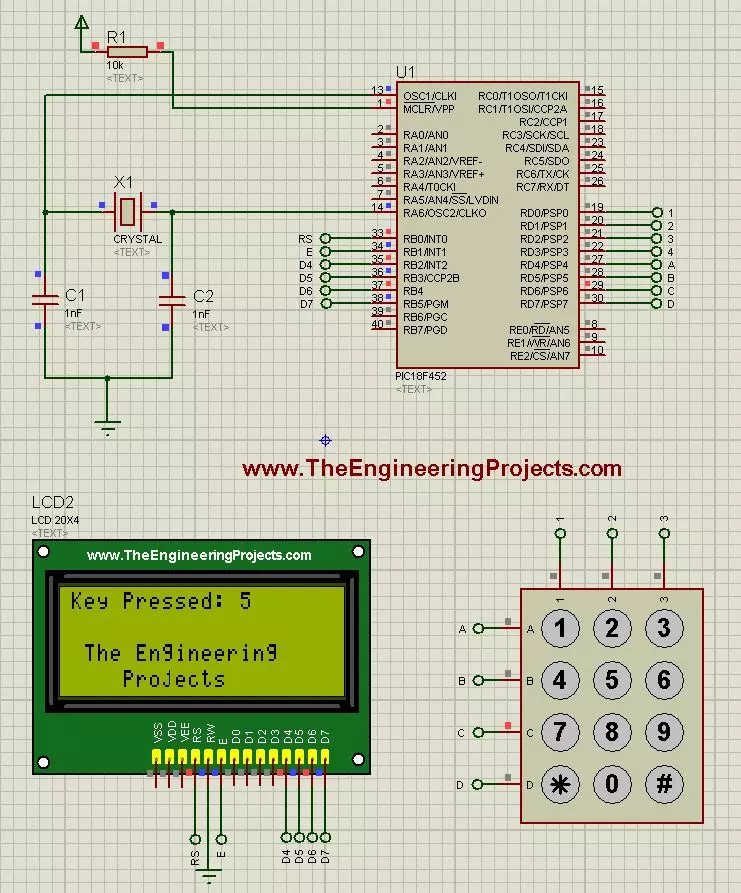
Hello friends, hope you all are fine and having fun with your lives. Today, I am going to share a new project which is Password Protection using PIC Microcontroller. In this project I am going to use keypad and LCD and will be designing a system in which I am gonna drive a motor if the correct password is supplied. If you entered the wrong password then the motor will not move and you will get another chance to enter the correct password. I hope you guys are gonna enjoy this one.
I have used Keypad, LCD and PIC Microcontroller in order to design the simulation in Proteus ISIS software. You should also have a look at Electronic Door Lock using PIC Microcontroller, which is quite similar with the only difference of keypad. In that previous project, ...
Hello everyone, today I am going to share Stepper Motor Control using PIC Microcontroller. We are all quite well aware of stepper motor but if you don't have much of the idea about this motor then you should give it a google search. :P Stepper motor is used in such projects where precise movement is required. Projects where we need to move the object at some particular angle. Stepper Motor works on electromagnetic phenomena. Electromagnets are present in the stepper motor and when we supply voltage across them, these electromagnets got polarized and produce a magnetic field and in order to depolarize them, what we need to do is simply depolarize these electromagnets. We all know that in motors, we have rotor and stater so in stepper motor these el ...
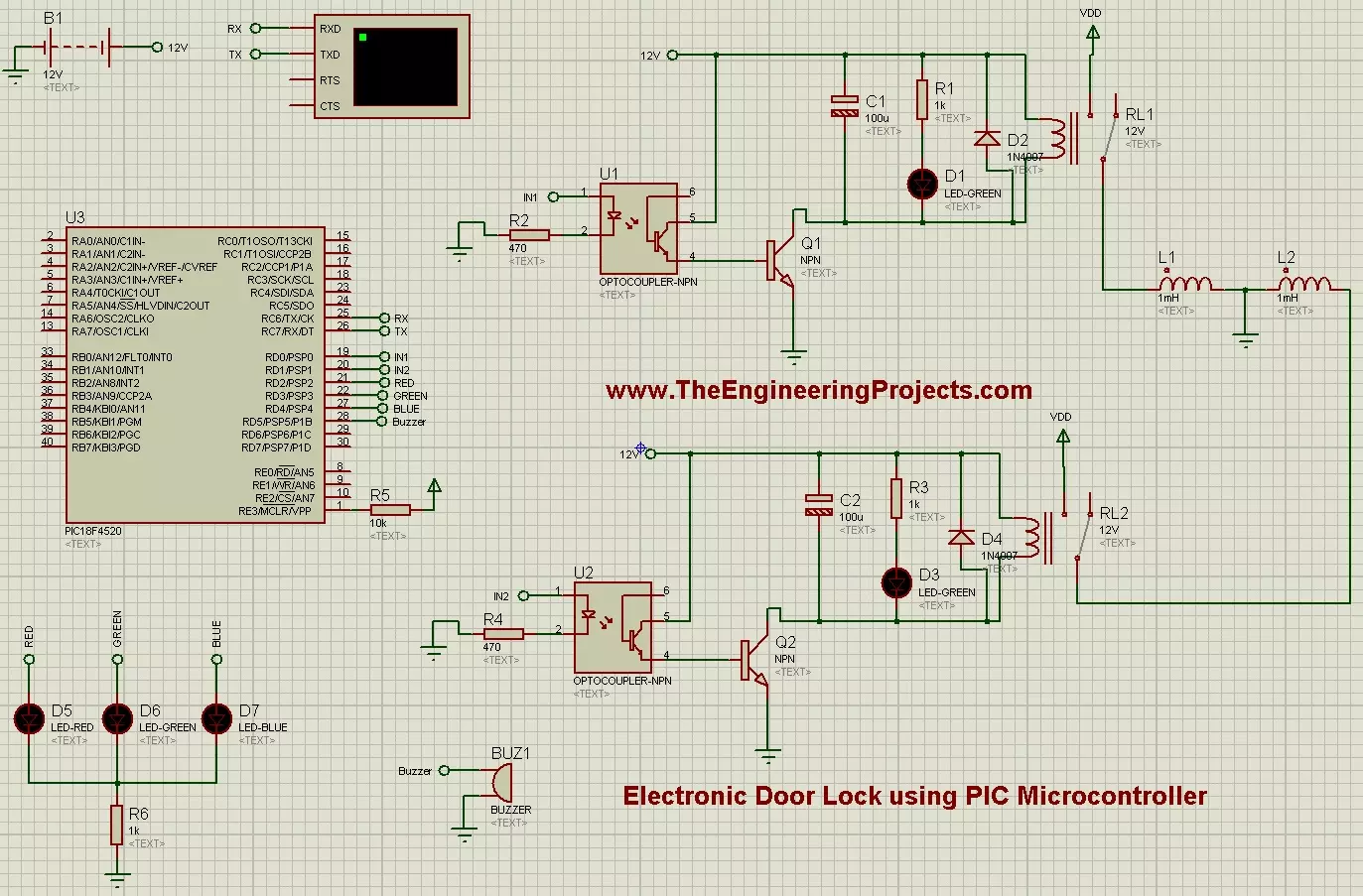
Hello friends, hope you are having fun. Today, I am going to share two types of Electronic Door Locks design using PIC Microcontroller and simulated in Proteus ISIS software. We all know about Electronic Door Locks as we have seen them in many homes. In electronic door locks, there's some password that is only known to some persons. Now if you enter the wrong password then the door won't open up and will ask for the password again. And if you keep on trying the wrong password then it will start the buzzer or can alert the concerned person via SMS etc. So, such electronic door locks are quite common in our society and are considered among the best electronic door locks.
Today, I am going to share a similar project in which I have simulated an Elect ...
Hello friends, hope you all are fine and having fun in your lives. Today, I am going to share Top 3 PIC C Compiler. We all know about PIC Microcontrollers because of which now we can quite easily add complex automation in our projects. So, today, I am going to share C compilers for PIC Microcontrollers. When an engineer starts working on some engineering project then he must have to choose a microcontroller. PIC is most commonly used Microcontroller in engineering projects. So, now when you have selected that you are gonna use PIC Microcontroller in your project then there comes a need which compiler to use for designing programming code for PIC Microcontroller.
It's quite a difficult as well as important decision because I have seen that once you ...