Hello friends! I hope you are doing well. Today, in this article, I am going to discuss about Business Administration bachelor degree. This is also known as BBA. Business Administration is a bachelor's degree in business administration & management. Usually, the duration of this degree program is 3 years in Europe and 4 years in the US. Here, I will cover the specialization areas, major & minor subjects of Business Administration bachelor degree, key skills, scope, future career opportunities, and top universities offer BBA degree.
Business Administration bachelor degree
The main aim of a Business Administration bachelor's degree is to provide a deep understanding of the functional features of a business and its interconnection. While it al ...
Hello Learners, Welcome to another useful tutorial at The Engineering Projects. In the world of electronics and circuits, many useful devices are designed that can minimize the requirement of large and complex circuits. At the Present time, we are working at such a device works very near to the base of many circuits i.e, IRFZ44N MOSFET. We'll approach to the answers of following Questions:
What is IRFZ44N MOSFET?
How is the Structure of IRFZ44N MOSFET?
What is the working mechanism for the IRFZ44N MOSFET?
How can we find the characteristics of IRFZ44N MOSFET in Proteus ISIS?
You will have some important chunks of information about the topic in DID YOU KNOW sections.
What is IRFZ44N MOSFET
As you can see, MOSFET is a acronym of Metal Oxid ...
Hi Guys! Hope you’re well today. I welcome you on board. In this post today, I’ll walk you through 10 must-have tools for PCB designing.
If you’re a hobbyist or working as a professional electronics engineer in some company, you need to execute electrical projects on and off. And needless to say, designing a PCB is a crucial part of an electrical project. Scores of tools are available online and it’s difficult for you to choose the right pick for your project.
10 Must-Have Tools for PCB Designing
The reason I have pulled together the 10 best software tools that you can use to design the printed circuit board. Some are better than others. Plus, some are free to use and a few of them are paid software, I’ll describe the main features of both of the ...
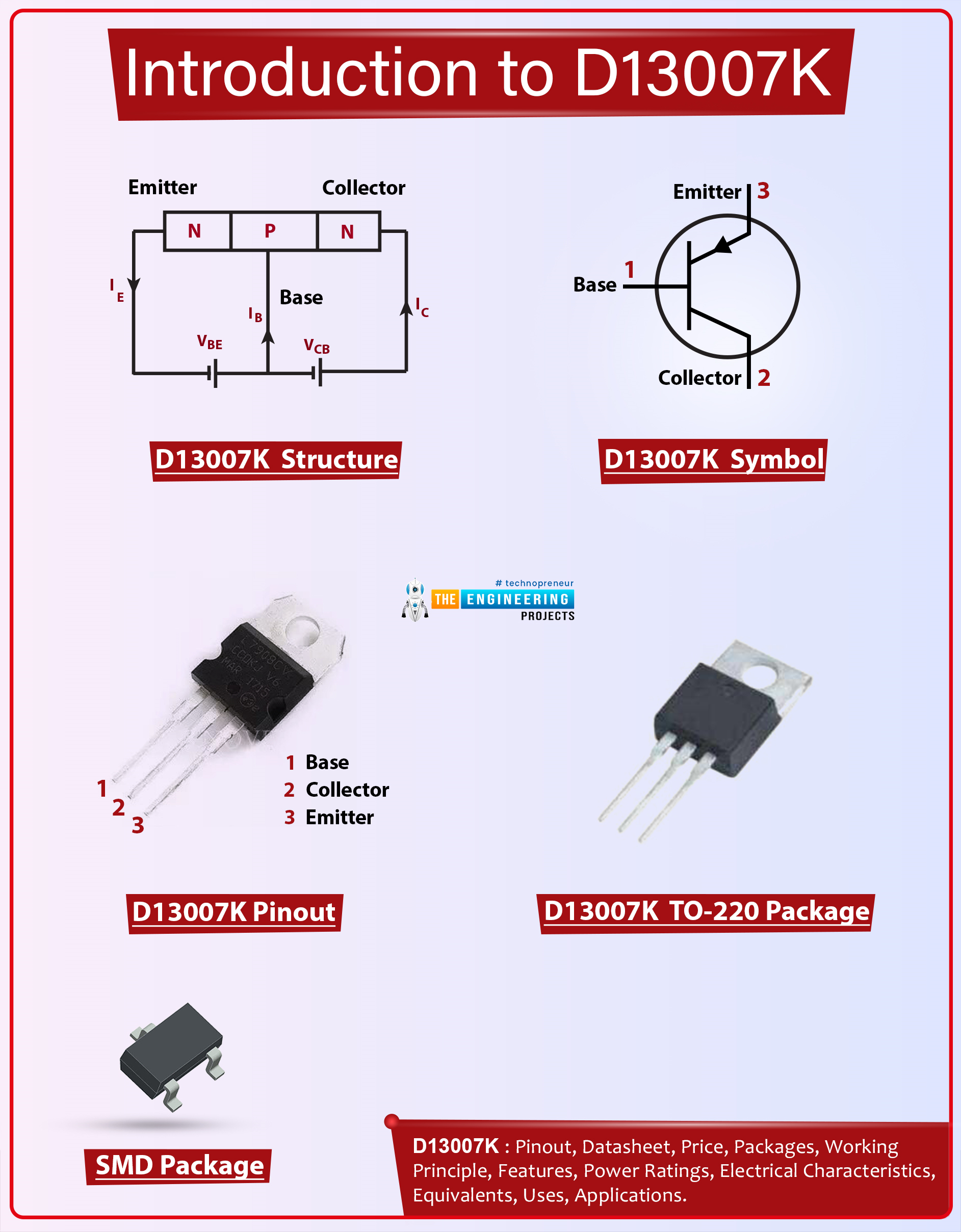
Hello Fellas! Hope you’re well today. Happy to see you around. In this post today, I’ll walk you through the Introduction to D13007K.
The D13007K is an NPN power transistor mainly used for switching and amplification purpose. This device is made of silicon material and falls under the category of bipolar junction transistors. As this is an NPN transistor so here major charge carriers are electrons. Holes are major carriers in the case of PNP transistors. This is a high voltage high current capability device used in energy-saving lamps. The collector current of this chip is 8A which means it is best for loads under 8A. And the power dissipation is 80W which projects it is eligible to release 80W power during the operation of this device. The collector-base voltage is 700V and collector-e ...
Hello friends! I hope you are doing well. Today, in this article, I am going to discuss online master degree programs. Master's degree is post-bachelor degree, which provides the modern knowledge and skills in the specific field of study. As compared to traditional master degree programs, online master degree programs are really getting popular because of their advantages such as flexibility of time, convenience and also the cost effectiveness. Here, I will discuss about online master degree programs, the popular online master degree programs of 2021, the advantage of studying online, and finally the top universities offering online master degree programs. so, let's get started:
Online Master Degree Programs
Online master degree programs are ava ...
Hello Readers! Today we'll talk about the , maintenance of water heater. To ensure that your home's heating system runs smoothly, you require multiple pieces of equipment. A water heater is of the most importance. Every household needs a water heater for numerous external and internal needs, such as the uninterrupted flow of warm water in the winters, washing tough stains off clothes, and sometimes cleaning and disinfecting surfaces with a mixture of warm water and antioxidants.
Since multiple parts of a water heater tank are in regular use, wear and tear are unavoidable. To ensure that your water heater lasts longer and continues to operate smoothly, read on. This article will take you through a heater's series of components, discussing a checkli ...
Hello friends! I hope you are doing well. In today's tutorial, I am going to discuss what is the Bachelor of Electrical Engineering? The Bachelor of Science in Electrical Engineering is a five-year academic degree program. It focuses mainly on planning, developing, and designing a sustainable, safe, and economical use of electrical energy. This degree enables students to design, develop and maintain electrical devices, electrical equipment, digital devices, and machinery control. Here, in this post, I will discuss the main branches of Electrical Engineering, major subjects, minor subjects, its scope, job opportunities, duration, cost, types of jobs, top universities offering this degree and top companies offering jobs for electrical engineers.
Bach ...
Hello friends! I hope you are doing well. Today, I am going to discuss the Bachelor degree in Engineering (B.Eng.). It is an academic degree of three to four years, and the start of your careers like designing the highways, machinery, building communities, working on technologies, innovative technologies, and creating new mechanical devices or tools. However, I will discuss the main branches of Engineering and their major subjects, scope of this degree, and top universities offer this degree programs.
Bachelor's degree in Engineering
Further, this degree is academically equal to the BSc ( Bachelor in Science) degree. It mainly aimed to provide technical skills to students. Universities also give many technical programs of applied sciences. But regu ...
Hi Guys! I welcome you on board. Thank you for clicking this read. In this post today, I’ll walk you through the Introduction to MJE13009.
MJE13009 is a semiconductor device made of silicon material that falls under the category of NPN transistors. This device is mainly used for switching and amplification purposes. The power dissipation of this device is 100W and the emitter-base voltage is 9V which is the amount of voltage needed to bias the device.
I suggest you read this post all the way through as I’ll describe the complete Introduction to MJE13009 covering datasheet, pinout, features, and applications.
Let’s get started.
Introduction to MJE13009
MJE13009 is an NPN transistor mainly used for amplification and switching purposes.
This is a semiconductor device made of ...
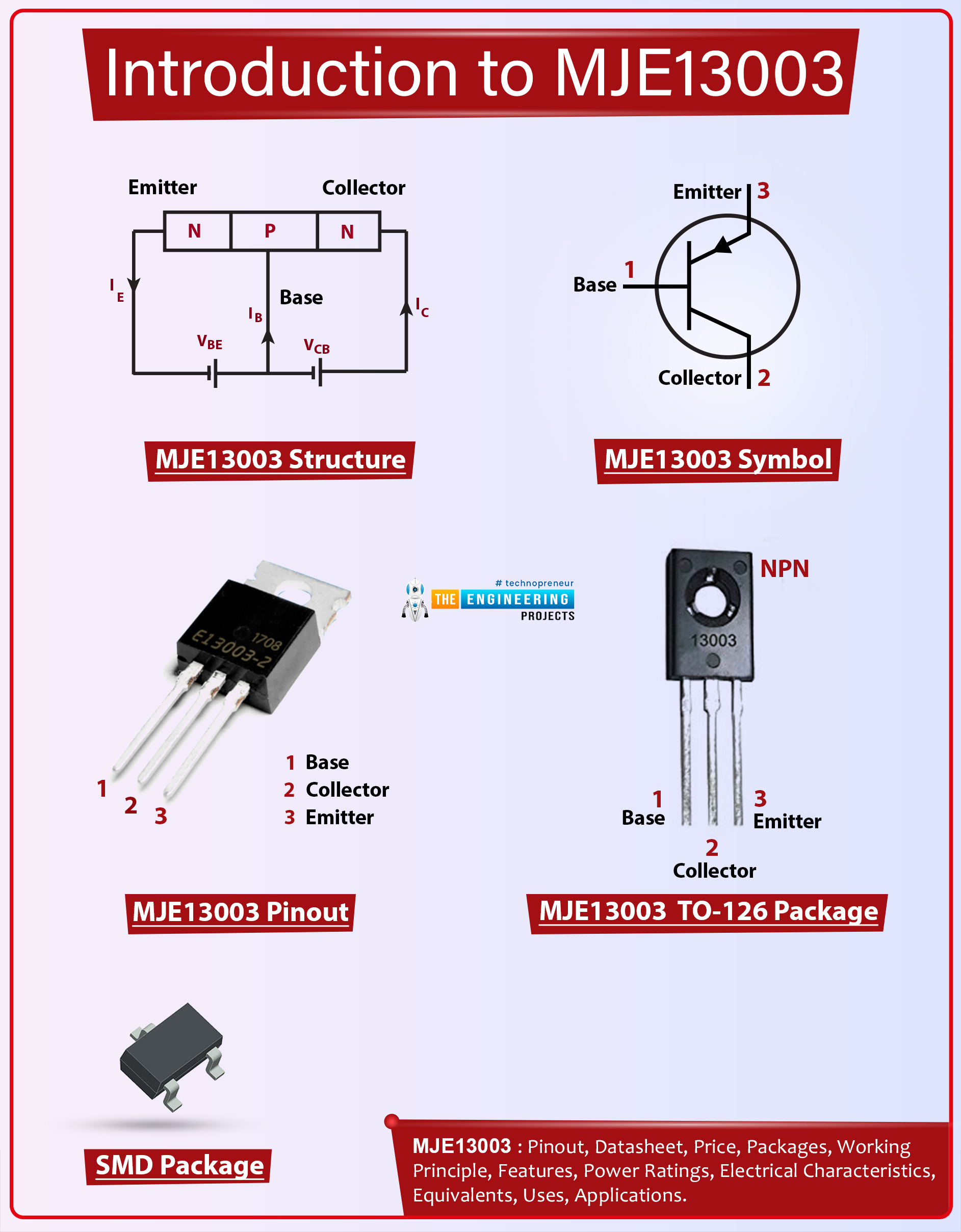
Hi Friends! Hope you’re well today. I welcome you on board. In this post today, I’ll demonstrate the Introduction to MJE13003.
MJE13003 is an NPN silicon transistor mainly used for high-speed high voltage power switching applications. This chip is a three-terminal device where a small current at one terminal is used to produce a large current at the remaining terminals. The collector current is 1.5A which projects this device can support load up to 1.5A.
I suggest you buckle up as I’ll describe the complete Introduction to MJE13003 covering datasheet, pinout, working principle, applications, power ratings, and physical dimensions.
Let’s get started.
Introduction to MJE13003
MJE13003 is a bipolar junction transistor that belongs to the NPN transistor family. It is mainly used ...