Hello students, I hope this tutorial finds you happy, healthy, and content. The topic we have at hand today is "3D printing", it is a very interesting and versatile topic, and extremely easy to comprehend as well, it would definitely keep you hooked to your screens. You might have heard a lot about 2D and 3D objects, in this digital era almost everyone has at least once heard of it, do you know what is a 3D object?
A 3D object can be defined as,
"An object or structure that has three dimensions which includes width, length, and height."
Rapididirect is a professional and reliable provider of custom 3D printing services. We equip with complete production capabilities and adopt multiple mainstream 3D printing technologies, including SLA, SLS, SL ...
Hello friends, I hope you all are happy, healthy and content! Today, we will be discussing the types of embedded systems. But, Before jumping to the types of embedded systems, let's first revise what is an Embedded System? I hope you have a clear idea about the embedded systems, if not, there is always a solution!
Definition of an embedded system
"An embedded system is a unique combination of computer hardware and a software designed for performing a specific function or set of functions from a certain input"
For a detailed overview of the embedded system and its components, you can refer to the complete article on our website about embedded systems.
Types of Embedded Systems
Presuming that you are well aware of the embedded systems and its compon ...
Hello friends, I hope you all are well. Today, we are going to share the second version of the Solar Panel Library for Proteus. You should also have a look at the first version of the Solar Panel Library, which we have posted around 2 years back and we were receiving suggestions to reduce its size as there's less space left for other components.
That's why we have designed this new Solar Panel Library and have reduced the size of the solar panel. We have also added a new black solar panel component to it. So, this library contains 2 solar Panel modules in it. First, let's have a look at a brief introduction to Solar Panel and then will download the Proteus Library zip file.
What is Solar Panel?
Solar Panels are designed using solar cells compos ...
Hello friends, I hope you all are doing great. In today's tutorial, I am going to share a new Vibration Sensor Library for Proteus V2.0. It's the second version of the Vibration Sensor Library for Proteus. In this library, we have four vibration sensors.
These vibrations sensors have both digital and analog output pins and can easily be connected with microcontrollers i.e. Arduino, PIC, Atmel etc. Before downloading the Proteus Library zip file, let's first have a look at the brief overview of Vibration Sensor:
What is Vibration Sensor?
A vibration sensor is a small embedded sensor, which is used to detect vibrations on any surface.
These vibration sensors are used for various purposes i.e. fault detection on heavy machinery, placed on doors ...
Hello everyone! I hope this article finds you happy, healthy and content. Today we are discussing a very interesting and versatile topic that might have crossed your path many times if you are related to any of the engineering fields most probably software, electrical, or mechanical, or if you are a final-year student struggling to get your project approved then you know the drill absolutely, or maybe you are someone who works with materials and crafts related to product design, Yes! You guessed it right! The topic we have at hand today is Prototyping.
Before proceeding and diving into the sea of prototyping, I want to make one thing very clear here: I'll be treating it in a generalized and systematic way; we will not limit our discussion to machine design or app design only!In fact, if y ...
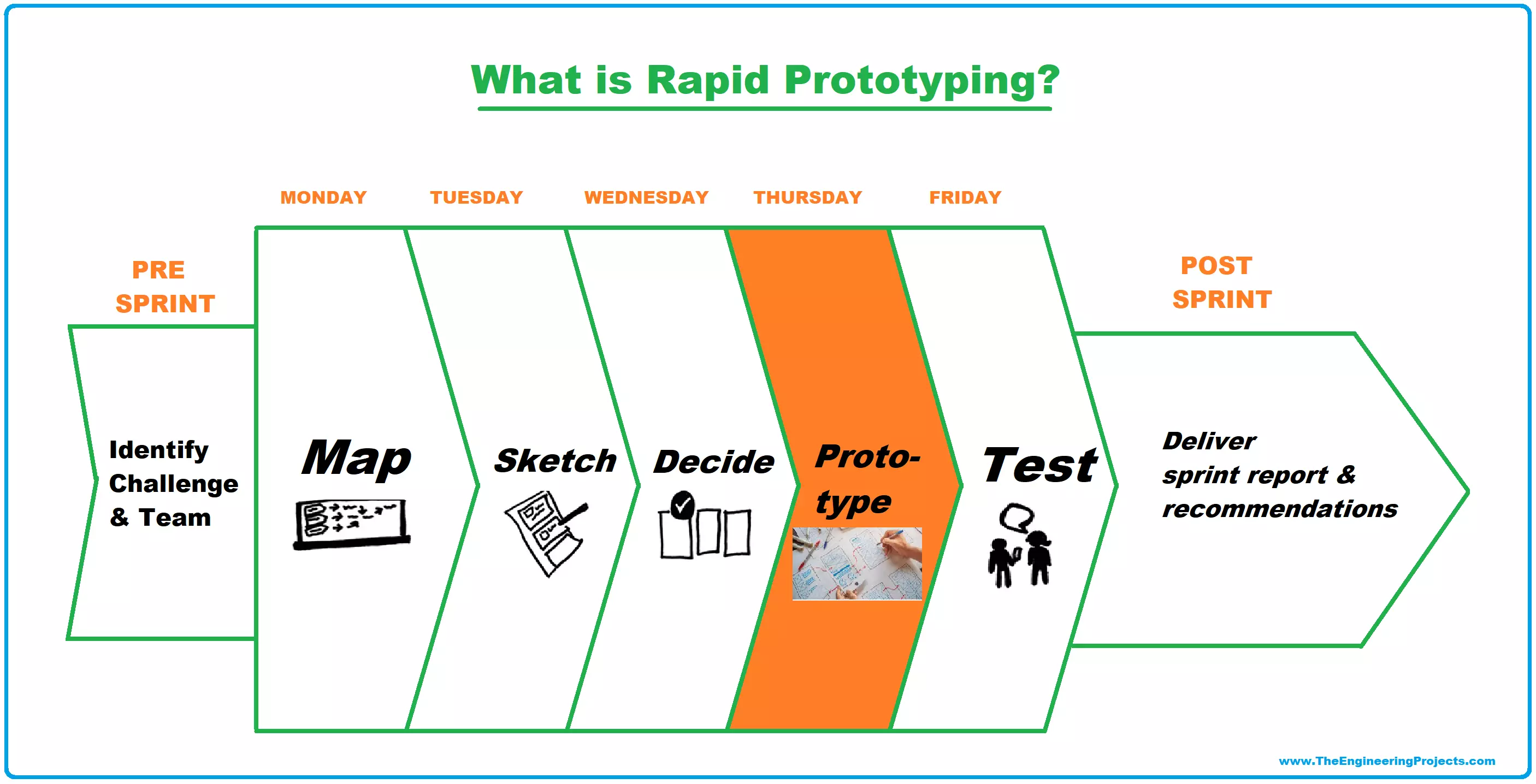
Hello friends, I hope you all doing great. In today's tutorial, we will have a look at What is Rapid Prototyping? We will also discuss different techniques used in rapid prototyping, Rapid Prototyping Software, Examples, Advantages etc. Have you ever witnessed the manufacturing process of new launches in large-scale and renowned industries? From rough draft to the final approval a lot of steps are involved to launch something new into a competitive market where a single flaw or defect can wipe you and your product off from the market. Rapid prototyping is one of those steps and techniques which helps mitigate that risk and is implied worldwide in many industries and businesses. Before we start our discussion on Rapid Prototyping, let's first discus ...
Hello friends, I hope you all are well. In today's tutorial, I am going to share a new CR2032 Lithium Coin Library for Proteus. This small cell is extensively used in electronics whereabouts because of its small size. CR2032 is not present in the Proteus components' database and we are quite pleased that we are sharing it for the first time.
This library contains 3 types of these small cells, one is the cell itself, while the other two models are cells with leads. Before downloading the Proteus Library zip file, let's first have a brief overview of CR2032:
What is CR2032???
CR2032(also called Lithium Coin) is a small round Lithium Manganese Dioxide battery, normally provides 3V.
As CR2032 is very small in size, thus used in small electronics ...
Hello friends, I hope you all are doing well. In today's tutorial, I am going to share a new Proteus Library of Single Cell Battery. These single-cell batteries are not present in Proteus, so we have designed them, I hope you guys will find them helpful.
This Proteus library has 5 Single Cell Batteries in it, we have designed the most common ones. Four of these batteries provide 3.7V, while one provides 12V. First, let's have a look at
What is a Single Cell Battery???
Single Cell Batteries are available in different voltage ranges and normally provide 3.7 volts.
Single Cell Battery is used in small electronic projects i.e. toys, clocks, alarms, calculators etc.
Few Single Cell Batteries are shown in the below figure, which we have simulated ...
Hello friends, I hope you all are doing great. In today's tutorial, we are going to share a new Sound Detector Library for Proteus. It's actually the second version of our previous library Sound Sensor Library for Proteus. We have changed the name as "Sound Detector" is written on these sensors. Moreover, this new sensor is quite small-sized, compact and also has an analog output pin.
We were receiving many complaints about the large size of the previous sound sensor, as it occupies more space and there's less space left for other components. So, this new one is quite small-sized and I am hopeful students will find it helpful. So, let's first have a look at What is Sound Detector Sensor and why is it used?
What is Sound Detector Sensor???
Sound ...
Hello friends, I hope you all are doing great. Today, I am going to share a new Infrared Tracker Sensor Library for Proteus. By using this library, you will be able to simulate IR based tracker sensor. This library contains 4 tracker sensors in it.
This Infrared Tracker Sensor is not present in Proteus software and we are sharing it for the first time. We have already shared 2 Proteus Libraries of Infrared sensors, you should check them as well.
Note:
You should also have a look at:
IR Proximity Sensor Library for Proteus.
Infrared Sensor Library for Proteus.
First, let's have a look at what is tracker sensor and why is it used?
What is IR Tracker Sensor???
IR Tracker Sensor uses Infrared technology and contains two IR LEDs on it. ...