In this article, I will explain the differential equations of fluid motion, i.e., conservation of mass (the continuity equation. So without wasting any time, let us start.
What is differential Analysis?
As a part of this article, it is essential to know what differential analysis is and how we can apply it to explain continuity and Naiver Stroke’s theorem.
Some of the essential key points related to the differential analysis are as follows:
Differential analysis is the application of a differential equation of fluid motion to any or every point in the flow field over a region called the Flow Domain.
Some readers might confuse the word differential with the small control volumes piled up on each other in the flow field.
Whenever the size of the control volume crosses the limit a ...
It is one of the most critical topics whenever. It is related to the resistance a fluid faces in motion. A fluid exerts a force on a body in a different direction. Now the main question is, what is drag? And what do we know about it?
What is Drag?
The definition of drag is as follows:
The force exerted on a flowing fluid in the direction of fluid flow is called drag.
Some of the essential key points related to the drag are as follows:
In order to elaborate on the drag force through an example. The body is attached to calibrated spring, and it is used to measure the displacement in the direction of flow.
The drag balances are one of those devices that are commonly used to measure the drag force.
It is not wrong to say that the drag force is much similar to the frictional force. ...
Hello Friends. I hope you are doing great. Here I am with another exciting topic of fluid mechanics, i.e. flow over bodies. In this article, I will explain the flow of fluids, the flow rate, their nature, the flow in pipes and much more. Fluid mechanics is all related to the fluid and its nature. I will discuss the forces that are on the body that is immersed in a fluid and the flow that is over the body. As the title shows, the main emphasis will be on the lift and drag forces. Moreover, the external and the internal flow will also be discussed in this article. And I am sure that you will enjoy reading this article. So without wasting any time, let us start.
I will start with an introduction to fluid flows.
Introduction
In this article, our focus will be the fluid flow over the bodies ...
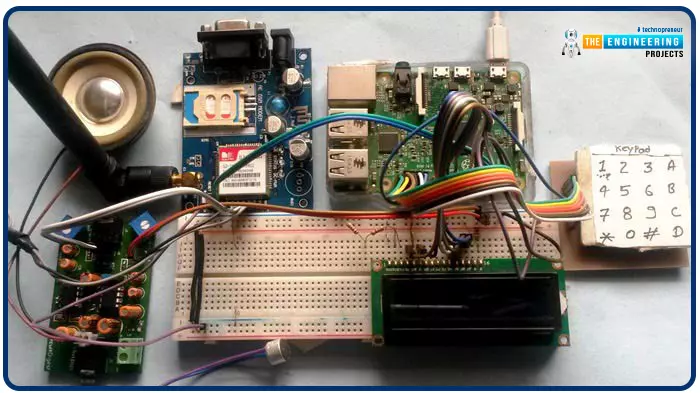
Greetings, and welcome to another tutorial in our series on the raspberry pi 4 Python programming. The previous guide covered the basics of transmitting data over the radio using the nrf24l01 chip in Pi 4. We also learned about interfacing Arduino and raspberry pi 4 and sending radio signals between the two devices. However, this tutorial will walk you through building a Raspberry Pi-based mobile phone with a microphone and speaker for making and receiving calls and reading text messages (SMS). This Project also serves as a proper GSM Module for the Raspberry Pi interface, with all the necessary Code to run the most fundamental features of any modern smartphone. First, we will understand what gsm is, its architecture and how it works, then we will learn how to program it in our pi 4; there ...
A teacher is the one who helps children to develop skills to learn and exploring the world. If we want our children to be skilled person, we need to take care of their education. Schools are not enough for them, homeschooling is a great idea where parents can teach their child with better attention. Parents must collaborate with teacher
for better result. A teacher is the one who helps children to develop skills to learn and exploring the world. If we want our children to be skilled person, we need to take care of their education. Schools are not enough for them, homeschooling is a great idea where parents can teach their child with better attention. Parents must collaborate with teacher for better result.
eLearning News for Pasco Parents
eLear ...
Introduction
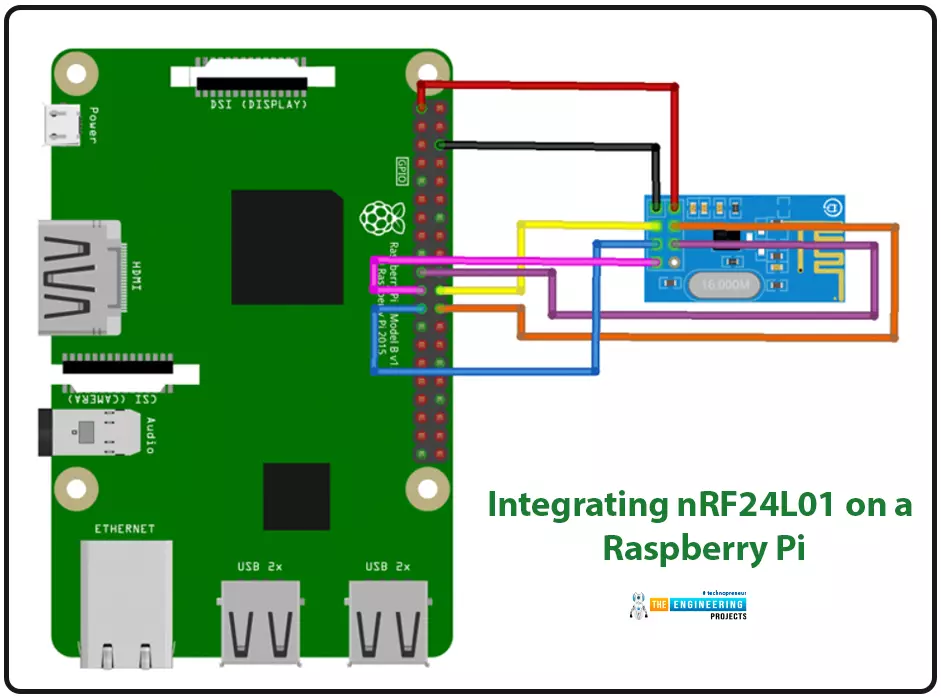
We're glad you could join us for another lesson in our series on programming for the Raspberry Pi 4. The previous chapter covered how to interface the USB barcode scanner with raspberry pi 4. We looked at different types of barcodes and what each stripe represents as well as the different types of barcode scanners available today. We also built a python program for the intelligent shopping cart and now our familiarity with barcodes and scanners and how they function has significantly increased. The benefits and drawbacks of its use were also discussed, but what we're interested in for this article is the transmission of radio frequency signals using the nrf24l01 Module in a raspberry pi 4.
Components
nRF24L01 RF module
Raspberry pi 4
Arduino Uno
Jumper wires
Power suppl ...
Hello friends, I hope you all are doing great. Today, we are going to start a new section in our Raspberry Pi Programming Course. In this section-VIII, we will implement advance protocols in the RPi4 board. Today's our first lecture in this section and we are going to interface a USB Bar Code Scanner with Raspberry Pi 4.If you have visited any big grocery store, you must have seen, it's
quite important as well as difficult to maintain the products in stock
at all times. To ease the job, barcode technology is used because it can
easily maintain an organized database of your items, costs, and
inventory levels in one convenient location. Price changes can be
implemented whenever you desire without requiring new labels for
previously packaged goods. You can tell exactly when your s ...
Technology is changing fast. It’s constantly shifting and evolving. Tech is making our lives easier but it’s also creating new problems. It is changing the way humans behave and interact with one another. Technology is providing answers to things we never knew and solutions to problems we can’t solve on our own. There is a lot of innovation happening right now, especially in the field of engineering. Below are five technologies that are being innovated by engineers.
3D Printing
You’ve probably seen a video of a 3D printer or have heard about what they can do. 3D printing is changing fast and enabling us to do a lot with it. 3D printing software
provides more tools and resources to print useful things for us. The medical industry has begun using ...
, In recent years, additive manufacturing (AM) has become an increasingly popular topic in the aerospace industry. Additive manufacturing is the process of making three-dimensional objects from a digital file. It is also known as 3D printing.
In general, additive manufacturing
builds objects by adding successive layers of material. This is in contrast to traditional manufacturing methods like machining or milling, which involve removing material from a block of metal or other material.
With technology evolving and becoming more widely adopted, additive manufacturing has transformed how aircraft are designed, built, and maintained.
This article will discuss some of the critical benefits of aerospace additive manufacturing.
1. Increases Product Complexity From Fewer Parts
Additive man ...
Hello, peeps! Welcome to another exciting tutorial on MATLAB in which we are discussing one of the most important windows of MATLAB that you are going to use the most. In the previous tutorial, we learned a lot about the basics of MATLAB and the different types of windows that are used in MATLAB and are present on the face of MATLAB when you launch it. There was a piece of interesting information about the basics of this fantastic development environment. This is the next step in the related tutorial in which we study the applications and workings of command windows in depth. Here is a glance at the topics that you are learning about today.
How can you define the command window of MATLAB in detail?
What are some examples of commands related to online help?
How can you use the usef ...